Node in a composite tree representing a sparta Tree item. More...
#include <TreeNode.hpp>
Classes | |
| struct | ANY_TYPE |
| Type for indicating that ANY notification source type should be included in a search performed by locateNotificationSources. More... | |
| class | delegate |
| Temporary delegate for notificaiton invokation until the implementation is working. This will then be merged with sparta::SpartaHandler. More... | |
| struct | NotificationInfo |
| Notification type/name information. More... | |
| class | type_info_container |
| Container for std::type_info. More... | |
Public Types | |
Types | |
| typedef uint64_t | node_uid_type |
| Type of unique-identifier assigned to every node. | |
| typedef std::vector< TreeNode * > | ChildrenVector |
| Vector of TreeNode children. | |
| typedef std::vector< std::string > | AliasVector |
| Vector of aliases (other names for this node) | |
| typedef std::multimap< std::string, TreeNode * > | ChildNameMapping |
| Mapping of names, aliases, and groups to individual child nodes within one node. This must be in a deterministic order, so an ordered container (e.g. std::map) is required. A sorted contained is probably desirable, but not required. | |
| typedef uint32_t | group_idx_type |
| Index within a group. | |
| typedef std::weak_ptr< TreeNode > | WeakPtr |
| Weak pointer to a TreeNode. Acquire with getWeakPtr. | |
| typedef std::weak_ptr< const TreeNode > | ConstWeakPtr |
| Weak pointer to a const TreeNode. Acquire with getWeakPtr. | |
| typedef std::shared_ptr< TreeNode > | SharedPtr |
| Shared pointer to TreeNode. Acquire with WeakPtr::lock(). | |
| typedef std::map< const std::string *, std::vector< TreeNode * > > | TagsMap |
| Map of strings (interned in StringManager) tags to TreeNodes. | |
 Public Types inherited from sparta::PhasedObject Public Types inherited from sparta::PhasedObject | |
| enum | TreePhase { TREE_BUILDING = 0 , TREE_CONFIGURING = 1 , TREE_FINALIZING = 2 , TREE_FINALIZED = 3 , TREE_TEARDOWN = 4 } |
| Current phase of tree construction (applies to node and entire tree). More... | |
Public Member Functions | |
| const Clock * | getClock () override |
| Walks up parents (starting with self) until a parent with an associated local clock is found, then returns that clock. | |
| const Clock * | getClock () const |
| const Clock * | getLocalClock () |
| Gets the clock associated directly with this Node. This is useful for configuration and simulator debug, but not at run-time. | |
| const Clock * | getLocalClock () const |
| virtual void | setClock (const Clock *clk) |
| Assigns a clock to this node. This clock will then be accessed by any descendant which has no assigned clock or an ancestor with an assigned clock between that descendant and this node. getClock returns the Clock associated with the nearest ancestor. | |
| Scheduler * | getScheduler (const bool must_exist=false) |
| Get the scheduler associated with this tree node's root. | |
| const Scheduler * | getScheduler (const bool must_exist=false) const |
| WeakPtr | getWeakPtr () |
| Gets a weak pointer to this TreeNode. This weak pointer is guaranteed to expire when this TreeNode is destructed unless locked. | |
| ConstWeakPtr | getWeakPtr () const |
| Const variant of getWeakPtr. | |
| virtual void | addLink (TreeNode *node, const std::string &label) |
| Link this tree node with another tree node. | |
| virtual void | activateLink (const std::string &label) |
| Activate one of the links added with addLink. | |
Construction | |
| TreeNode ()=delete | |
| Not default-constructable. | |
| TreeNode (const TreeNode &)=delete | |
| Not copy-constructable. | |
| TreeNode (TreeNode &&rhp) | |
| Move constructor. | |
| TreeNode & | operator= (const TreeNode &)=delete |
| Not assign-constructable. | |
| TreeNode (TreeNode *parent, const std::string &name, const std::string &group, group_idx_type group_idx, const std::string &desc, bool is_indexable) | |
| TreeNode full constructor. Initializes node and adds it as a child of an existing tree node (if parent is not null). | |
| TreeNode (TreeNode *parent, const std::string &name, const std::string &group, group_idx_type group_idx, const std::string &desc) | |
| TreeNode constructor with no is_indexable parameter [defaults to true]. | |
| TreeNode (const std::string &name, const std::string &group, group_idx_type group_idx, const std::string &desc) | |
| TreeNode constructor with no parent Node. | |
| TreeNode (TreeNode *parent, const std::string &name, const std::string &desc) | |
| TreeNode constructor with no group information. | |
| TreeNode (TreeNode *parent, const std::string &group, group_idx_type group_idx, const std::string &desc) | |
| TreeNode constructor for anonymous node with group information. | |
| TreeNode (const std::string &name, const std::string &desc) | |
| TreeNode constructor with no parent node or group information. | |
| virtual | ~TreeNode () |
| Virtual destructor. | |
Identification | |
| void | addAlias (const std::string &alias) |
| Add a single alias for this node. | |
| void | addAliases (const AliasVector &v) |
| Adds each element of a vector of aliases to this node.. | |
| void | addTag (const std::string &tag) |
| Adds single tag to this node. | |
| void | addTags (const std::vector< std::string > &v) |
| Adds each elements of a vector of tags to this node. | |
Node-Representation | |
| virtual std::string | stringize (bool pretty=false) const |
| Create a string representation of this node. | |
| void | stringizeTags (std::stringstream &ss) const |
| Render tags to a string in the form: " tags:[tag0, tag1]" If there are any tags. The leading space makes this a useful sub-utility of stringize because if there are no tags, returns empty string with no leading space. | |
Node Attributes | |
| node_uid_type | getNodeUID () const |
| Gets the unique ID of this node. | |
| const std::string & | getName () const override |
| Gets the name of this node. | |
| const std::string * | getNamePtr () const |
| Gets the name of this node's string pointer which isinterned in StringManager) | |
| bool | isAnonymous () const |
| Is this node anonymous. | |
| bool | isExpired () const |
| Is this expired (i.e. has it been the rhp of a move constructor) | |
| bool | isIndexableByGroup () const |
| Returns whether this object is accessible through its parent's interfaces for getting children by group and index. | |
| const std::string & | getGroup () const |
| Gets the group name of this node. | |
| const std::string * | getGroupNamePtr () const |
| Gets the group name string pointer (interned in StringManager singleton) of this node. | |
| group_idx_type | getGroupIdx () const |
| Gets the group index of this node. | |
| const std::vector< const std::string * > & | getTags () const |
| Gets the set of tags associated with this TreeNode. | |
| bool | hasTag (const std::string &tag) const |
| Does this node have a specific tag (by name) | |
| bool | hasTag (const std::string *interned_tag_name) const |
| Does this node have a specific tag (by string pointer interned with StringManager). This is faster than the alternate hasTag method because it relies only on pointer comparisons. | |
| const std::string & | getDesc () const |
| Gets the description of this node. | |
| bool | isBuiltin () const |
| Is this node in the builtins group. | |
| void | markHidden (bool hidden=true) |
| Marks this TreeNode hidden for the purposes of printint out nodes. This does not make the node inaccessible, but causes it (and its subtree) to be hidden from typical recursive tree printouts. | |
| bool | isHidden () const |
| Is this TreeNode supposed to be hidden during tree printouts This value does not have to be respected by anything using TreeNode and is mainly a UI/printout convenience. | |
Node Validation | |
| void | validateName (const std::string &nm) |
| Validates the given name string for this TreeNode. Does not consider context (e.g. name collisions) | |
| void | validateGroup (const std::string &name, const std::string &group, group_idx_type idx) |
| Validates the given group name string and group index for this TreeNode. Does not consider context (e.g. name collisions) | |
| void | validateDesc (const std::string &desc) |
| Validates the given description string for this TreeNode. | |
Tree-Building | |
| void | addChild (TreeNode *child, bool inherit_phase=true) |
| Adds a TreeNode to this node as a child. | |
| void | addChild (TreeNode &child) |
| AddChild by reference for convenience. | |
| void | makeSubtreePrivate () |
| Make the entire subtree private. | |
| void | setScopeRoot () |
| bool | isScopeRoot () const |
| Public Member Functions inherited from sparta::ResourceContainer | |
| ResourceContainer () | |
| Consturct with a null, unlocked resource. | |
| ResourceContainer (const ResourceContainer &)=delete | |
| Copy construction disbled. | |
| ResourceContainer (ResourceContainer &&)=default | |
| Move constructor. | |
| virtual | ~ResourceContainer () |
| Destructor. | |
| Resource * | getResource () |
| Gets the resource contained by this node if any. May only be called after finalization begins or during teardown. | |
| const Resource * | getResource () const |
| Const variant of getResource. | |
| bool | hasResource () const |
| Determines if this node has a resource. This method exists in case the TreeNode is being explored by a tool or interactive UI. Typical TreeNode clients (such as Resources) will assume that there is a resource if they are expecting one. | |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| const T | getResourceAs () const |
| Gets the resource contained by this node (if any) as the given type. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| const T * | getResourceAs () const |
| Overload of getResourceAs for const access with a non-pointer template type. | |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| T | getResourceAs () |
| Non-const overload of getResourceAs. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| T * | getResourceAs () |
| Non-const overload of getResourceAs. | |
| virtual std::string | getResourceType () const |
| Gets the typename of the resource that this node will eventually contain. | |
| virtual std::string | getResourceTypeRaw () const |
| Gets the typename of the resource that this node will eventually contain. | |
| Public Member Functions inherited from sparta::PhasedObject | |
| PhasedObject (PhasedObject &&)=default | |
| TreePhase | getPhase () const |
| Gets the trees current phase. | |
| virtual bool | isBuilding () const |
| Is this node (and thus the entire tree above and below it) currently in the TREE_BUILDING phase. | |
| virtual bool | isBuilt () const |
| Is this node (and thus the entire tree above it) "built". Checks that getPhase has passed TREE_BUILDING. | |
| virtual bool | isConfigured () const |
| Is this node (and thus the entire tree above it) "configured". Checks that getPhase has passed TREE_CONFIGURING (i.e. FINALIZED, FINALIZING, TEARDOWN, etc). | |
| virtual bool | isConfiguring () const |
| Is this node (and thus the entire tree above it) currently in the TREE_CONFIGURING phase. | |
| virtual bool | isFinalizing () const |
| Is this node (and thus the entire tree above it) "finalized". | |
| virtual bool | isFinalized () const |
| Is this node (and thus the entire tree above it) "finalized". | |
| virtual bool | isTearingDown () const |
| Is this node (and thus the entire tree above it) in the "teardown" phase. | |
| Public Member Functions inherited from sparta::ArchDataContainer | |
| std::vector< ArchData * > | getAssociatedArchDatas () |
| Retrieves all ArchDatas associated with this TreeNode so that children can use it to allocate their data. | |
| const std::vector< ArchData * > | getAssociatedArchDatas () const |
| Const variant of getAssociatedArchDatas. | |
| ArchDataContainer ()=default | |
| Default constructor. | |
| ArchDataContainer (ArchDataContainer &)=delete | |
| Copy construction disabled. | |
| ArchDataContainer (ArchDataContainer &&)=default | |
| Move constructor. | |
| virtual | ~ArchDataContainer () |
| Virtual destructor. | |
Static Public Member Functions | |
| static std::string | createSearchRegexPattern (const std::string &pat) |
| Compute a regex pattern for a node child path containing any number of wildcard characters (not a dot-separated location) which can be used to test against child node names. | |
| static bool | hasWildcardCharacters (const std::string &name) |
| Determines if a given node name has any wildcard characters which will be substituted in createSearchRegexPattern. | |
| static std::string | getNextName (const std::string &name, size_t &pos) |
| Gets the next name between two '.' chars in a string starting at pos. | |
| static bool | matchesGlobLike (const std::string &pattern, const std::string &other) |
| Determine if a glob-like search pattern matches some other string. | |
Static Public Attributes | |
Constants | |
| static const group_idx_type | GROUP_IDX_NONE = (group_idx_type)-1 |
| GroupIndex indicating that a node has no group index because it belongs to no group. | |
| static const node_uid_type | MAX_NODE_UID |
| Maximum value of node_uid_ before the framework throws an exception. | |
| static constexpr char | GROUP_NAME_NONE [] = "" |
| Group name indicating that a node belongs to no group. | |
| static constexpr char | NODE_NAME_NONE [] = "" |
| Node name for anonymous node. | |
| static const std::string | DEBUG_DUMP_SECTION_DIVIDER |
| String dividing sections in a debug dump file. | |
| static constexpr char | NODE_NAME_VIRTUAL_GLOBAL [] = "_SPARTA_virtual_global_" |
| Node name for the virtual glopbal node. | |
| static constexpr char | LOCATION_NODE_SEPARATOR_ATTACHED = '.' |
| Separator character between node identifiers in a location string when the child is attached to the parent. | |
| static constexpr char | LOCATION_NODE_SEPARATOR_EXPECTING = ',' |
| Separator character between node identifiers in a location string when the child is being attached to the parent but has not been entirely attached (i.g. during construction of the child node) | |
| static constexpr char | LOCATION_NODE_SEPARATOR_UNATTACHED = '~' |
| Separator character preceding a node identifiers in a location string when that node has no parent and is not in the process of being attached to one. | |
| static const uint32_t | RENDER_SUBTREE_INDENT = 2 |
| Spaces to indent for each tree level in sparta::TreeNode::renderSubtree. | |
| static constexpr char | GROUP_NAME_BUILTIN [] = "_SPARTA_builtin_group_" |
| Reserved name for built-in nodes. | |
| static const uint64_t | CHILD_FIND_THRESHOLD = 100000 |
| Threshold for number of findChildren calls after finalization before a warning message is printed about framework misuse. | |
| static const uint64_t | CHILD_GET_THRESHOLD = 100000 |
| Threshold for number of getChild calls after finalization before a warning message is printed about framework misuse. | |
| static const uint32_t | TEARDOWN_ERROR_LIMIT = 5 |
| Number of teardown-phase-related messages that can be printed before the rest will be suppressed. | |
| static const std::vector< std::pair< const char *, std::function< void(std::string &)> > > | TREE_NODE_PATTERN_SUBS |
| List of pattern susbtitutions when creating a search pattern from a TreeNode name containing wildcards. | |
Protected Member Functions | |
| std::pair< uint32_t, std::string > | recursGetDeepestMatchingPath_ (const std::string &path, size_t name_pos) const |
| Finds the deepest node path mathing the input path. Implements getDeepestMatchingPath. | |
| void | setExpectedParent_ (const TreeNode *parent) |
| Tracks a node as an expected parent without actually adding this node as a child. This is used almost exclusively for printing error messages which include a device-tree location BEFORE actually inserting this node into the device tree since node construction can fail. | |
| void | enterFinalizing_ () |
| Recursively enter TREE_FINALIZING phase. | |
| void | finalizeTree_ () |
| Recursively create resources based on tree configuration. enter_finalize_ should be invoked after this method successfully completes for an entire tree. Finalizes in the order of construction. | |
| void | validateTree_ () |
| Iterates the finalized tree and validates each node (e.g. ensures statistics can be evaluated) | |
| void | enterFinalized_ () |
| Recursively enter TREE_FINALIZED phase. | |
| void | enterConfig_ () noexcept |
| Recursively enter TREE_CONFIGURING phase. | |
| void | bindTreeEarly_ () |
| Recursively invoke TreeNode::onBindTreeEarly_ and Resource::onBindTreeEarly_ (in that order for each node) | |
| void | bindTreeLate_ () |
| Recursively invoke TreeNode::onBindTreeEarly_ and Resource::onBindTreeLate_ (in that order for each node) | |
| void | simulationTerminating_ () |
| Hook to allow simulation resources to clean-up before simulation is ended. | |
| void | validatePostRun_ (const PostRunValidationInfo &info) const |
| Hook to check the state of the simulator post-run and throw exceptions if something is incorrect. | |
| void | dumpDebugContent_ (std::ostream &out) const noexcept |
| Allows resources to write out detailed textual debugging information about the node. This is typically called by a simulator when shutting down due to an exception (or depending on simulator config). However, it could also be called at other times. | |
| void | enterTeardown_ () noexcept |
| Recursively enter TREE_TEARDOWN phase while alerting nodes through onEnteringTeardown_ and alterting Resources through Resource::onStartingTeardown_. Nodes already in TREE_TEARDOWN phase will not be alerted (neither will their associated Resources). All nodes are visited regardless of their parent's phase. | |
| void | verifyUniqueChildIdentifier_ (const std::string &ident, bool ignore_group_collision=false) |
| Verifies that the given identifier is unique for all children of this node by comparing against names, groups, and aliases. Throws SpartaException if not unique. | |
| void | removeChildForTeardown_ (TreeNode *child) |
| "Removes" the given child by invoking onDestroyingChild_ then removing this child from the children_ list | |
| void | removeFromParentForTeardown_ (TreeNode *parent) |
| Protected Wrapper for getParent()->removeChildForTeardown_ which allows subclases of TreeNode to indirectly invoke removeChildForTeardown_ with themselves as the argument. | |
| void | detachFromParent_ () |
| Removes a node from its parent with the expectation this node will be immediately destroyed (i.e. is an xvalue) | |
| void | detachFromChildren_ () |
| Removes a node from its children with the expectation this node will be immediately destroyed (i.e. is an xvalue) | |
| bool | areParametersLocked_ () const |
| This method informs whether the tree is past the lockdown phase for all LOCKED and HIDDEN parameters. Modifying LOCKED and HIDDEN parameters after this phase is disallowed. Tree can be locked down during TREE_BUILDING phase or TREE_CONFIGURING phase. During TREE_FINALIZING phase, all parameters are locked down as is. | |
| Protected Member Functions inherited from sparta::ResourceContainer | |
| std::string | getResourceTypeName_ () const |
| Gets the rtti type name (demangled) of the resource type held by this container. If there is no resource held, returns empty string. | |
| void | setResource_ (Resource *r) |
| Allows subclasses to assign the resource associated with this node. | |
| void | unsetResource_ () |
| Allows a resource to unset the resource set with setResource_. | |
| void | lockResource_ () |
| Allows subclasses to assign the resource associated with this node. | |
| Resource * | getResource_ () noexcept |
| Returns the currently held resource of this node (if any). This method can be called at any time. | |
| const Resource * | getResource_ () const noexcept |
| Const variant of getResource_. | |
| Protected Member Functions inherited from sparta::PhasedObject | |
| void | setPhase_ (TreePhase phase) |
| Sets the current phase. | |
Static Protected Member Functions | |
| static bool | identityMatchesPattern_ (const std::string &ident, std::regex &expr, std::vector< std::string > &replacements) |
| Performs pattern matching on a identity string. | |
| static bool | identityMatchesPattern_ (const std::string &ident, std::regex &expr) |
| Variant of identityMatchesPattern_ with no replacements vector. | |
| static std::string | getPreviousName_ (const std::string &name, size_t &pos) |
| Gets the previous name between two '.' chars in a string starting at pos. | |
Friends | |
| class | VirtualGlobalTreeNode |
| Allow this class access internals for handling notification observation registration/deregistration broadcasts in a way that does not fit the composite tree pattern. | |
| class | ClockManager |
| Allow ClockManager to directly change phase on nodes. | |
| class | SpartaStaticInitializer |
| This class is responsible for instantiating the static container held by this TreeNode. | |
| class | TreeNodePrivateAttorney |
| Friend an attorney pattern that can expose access to getAllChildren_ or other methods that bypass privacy_level_. | |
TreeNode extensions | |
| using | ExtensionsBase = detail::ExtensionsBase |
| void | addExtensionFactory (const std::string &extension_name, std::function< ExtensionsBase *()> factory) |
| Add an extension factory to this tree node by its type (name). | |
| ExtensionsBase * | getExtension (const std::string &extension_name, bool no_factory_ok=false) |
| Get an extension object by extension name. | |
| const ExtensionsBase * | getExtension (const std::string &extension_name) const |
| Get an extension object by extension name. | |
| template<typename ExtensionT > | |
| ExtensionT * | getExtensionAs (const std::string &extension_name) |
| Get an extension, downcast to the given type. | |
| template<typename ExtensionT > | |
| const ExtensionT * | getExtensionAs (const std::string &extension_name) const |
| Get an extension, downcast to the given type. | |
| ExtensionsBase * | getExtension () |
| Get an extension without needing to specify any particular extension name. If no extensions exist, returns nullptr. If only one extension exists, returns that extension. If more than one extension exists, throws an exception. | |
| const ExtensionsBase * | getExtension () const |
| Get an extension without needing to specify any particular extension name. If no extensions exist, returns nullptr. If only one extension exists, returns that extension. If more than one extension exists, throws an exception. | |
| ExtensionsBase * | createExtension (const std::string &extension_name, bool replace=false) |
| Create an extension on demand. This is useful if you want to add an extension to a node that was not specified in any of the –extension-file, –arch, –config-file, or –node-config-file YAML files. | |
| ExtensionsBase * | createExtension (bool replace=false) |
| Create an extension on demand without needing to specify any particular extension name. If the arch/config/extension YAML input files have exactly one extension configured for this TreeNode, that extension will be created. | |
| ExtensionsBase * | createExtension (const char *extension_name, bool replace=false) |
| template<typename ExtensionT , typename... Args> | |
| ExtensionT * | addExtension (Args &&... args) |
| Add an extension, specifying the ExtensionsBase subclass type. Forward any arguments needed to your subclass extension's constructor. The typical use case for addExtension() over the other apis is that these extensions are meant to be dynamic-only (on-demand only), bypassing the finalizeTree() checks that all extension parameters have been read. You can call addExtension() whenever you want. | |
| template<typename Extension , typename... Args> | |
| Extension * | replaceExtension (Args &&... args) |
| Replace an extension, specifying the ExtensionsBase subclass type. This api is similar to addExtension() in that you do not have to read these parameters prior to finalizeTree() to avoid "unread unbound parameter" exceptions. | |
| bool | removeExtension (const std::string &extension_name) |
| Remove an extension by its name. Returns true if successful, false if the extension was not found. | |
| bool | hasExtension (const std::string &extension_name) const |
| Check if this tree node has an extension by the given name. | |
| template<typename ExtensionT > | |
| bool | hasExtensionOfType (const std::string &extension_name) const noexcept |
| Check if this tree node has an extension by the given name and type. | |
| std::set< std::string > | getAllInstantiatedExtensionNames () const |
| Get a list of extension names for all instantiated extensions on this TreeNode. | |
| std::set< std::string > | getAllConfigExtensionNames () const |
| Get a list of extension names found for this node in all arch/config/extension files. | |
| size_t | getNumExtensions () const |
| Get the number of extensions for this node. | |
| std::map< std::string, const ExtensionsBase * > | getAllExtensions () const |
| Get a map of extensions for this node. | |
Internal Notification System | |
| typedef std::vector< delegate > | DelegateVector |
| Vector of delegates representing a list of observers to notify. | |
| typedef std::map< type_info_container, DelegateVector > | NotificationObserverMap |
| Map of delegate vectors containing all observers. | |
| template<typename DataT > | |
| void | postPropagatingNotification_ (const TreeNode *origin, const DataT &data, const std::string *name_id) |
| Starts a notification propagating up the tree. | |
| template<typename DataT , typename T , void(T::*)(const TreeNode &, const TreeNode &, const DataT &) TMethod> | |
| DelegateVector::iterator | findDelegate_ (DelegateVector &dvec, T *obj, const std::string &target_name) |
| Finds a delegate associated with the given type T, object pointer, DataT, and TMethod within a DelevateVector. The intent of this function is to help see if a delegate is already registered with a calback by checking all known information associated with that callback against the input arguments. | |
| template<typename DataT , typename T , void(T::*)(const DataT &) TMethod> | |
| DelegateVector::iterator | findDelegate_ (DelegateVector &dvec, T *obj, const std::string &target_name) |
| virtual void | broadcastRegistrationForNotificationToChildren_ (const std::type_info &tinfo, const std::vector< const std::string * > &name_ids, TreeNode *obs_node, const delegate *del, const bool allow_private) |
| Recursively notifies children that the notification described is now (or still is) being observed at the observation point TreeNode obs_node with the newly registered delegate del. | |
| virtual void | broadcastDeregistrationForNotificationToChildren_ (const std::type_info &tinfo, const std::vector< const std::string * > &name_ids, TreeNode *obs_node, const delegate *del, const bool allow_private) |
| Recursively notifies children that the notification described has lost one particular observer (del) which was observing at the observation point TreeNode obs_node with the delegate del. | |
| void | broadcastRegistrationForNotificationListStringToChildren_ (const std::type_info &tinfo, const std::string &name, TreeNode *obs_node, const delegate *del, const bool private_only) |
| Entry point to broadcastRegistrationForNotificationToChildren_ recursion. Breaks a name string. | |
| void | broadcastDeregistrationForNotificationListStringToChildren_ (const std::type_info &tinfo, const std::string &name, TreeNode *obs_node, const delegate *del, const bool private_only) |
| Symmetric oppostie of broadcastRegistrationForNotificationListStringToChildren_. | |
| template<typename DataT > | |
| void | invokeDelegatesOn_ (TreeNode *to_invoke, const DataT &data, const std::string *name_id) |
| Protected wrapper for invokeDelegates_ which allows a TreeNode to invoke delegates on another TreeNode using itself as the origin. | |
Diagnostics | |
| void | lockdownParameters () |
| Method to put the device tree in lockdown phase. All LOCKED and HIDDEN parameters are frozen after this point. Regular parameters are not affected by this phase. This method requires a Simulation pointer and will assert at compile time if anyone tries to lockdown the tree without the context of a Simulation. | |
| static const std::map< const TreeNode *, WeakPtr > & | getParentlessNodes () |
| static const std::map< const TreeNode *, WeakPtr > & | getAllNodes () |
| Gets the vector of all TreeNodes currently known to be constructed. | |
| static std::string | formatAllNodes () |
| Prints the list of all TreeNodes currently known to be constructed. | |
| static bool | isNodeConstructed (const TreeNode *) |
| Is a given node constructed? | |
Tree Navigation & State | |
| virtual bool | isAttached () const |
| Is this node part of a device tree with a proper RootTreeNode at the root. | |
| virtual TreeNode * | getParent () |
| Gets immediate parent of this node if one exists. | |
| virtual const TreeNode * | getParent () const |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| const T | getParentAs (bool must_exist=true) const |
| Retrieves a parent casted to type T* if this node has a parent. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| const T * | getParentAs (bool must_exist=true) const |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| T | getParentAs (bool must_exist=true) |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| T * | getParentAs (bool must_exist=true) |
| virtual TreeNode * | getRoot () |
| Gets farthest ancestor of this node. | |
| virtual const TreeNode * | getRoot () const |
| TreeNode * | getScopeRoot () |
| const TreeNode * | getScopeRoot () const |
| const TreeNode * | getExpectedRoot () const |
| build-time equivalent to getRoot before an object is actually attached to a tree. This is a mainly a framework and debugging tool for determining what the root of a node being constructed will be when complete | |
| app::Simulation * | getSimulation () const |
| Gets the simulation (if any) associated with this tree. | |
| uint32_t | getNumChildren () const |
| Gets the number of children that this node has including those in the sparta builtins group. | |
| TreeNode * | getChildAt (uint32_t idx) const |
| Gets a child at a position in the children vector in the order in which they were added to this node. | |
| const ChildrenVector | getChildren () const |
| Gets a vector of all children of this node in any group in the order in which they were added to this node. | |
| uint32_t | getChildren (std::vector< TreeNode * > &results, bool ignore_builtin_group=true, bool ignore_anonymous_nodes=true) |
| Gets all children of this node in the order in which they were added to this node. | |
| template<class T > | |
| uint32_t | getChildrenOfType (std::vector< T * > &results) const |
| return all the children matching a particular type using dynamic cast. | |
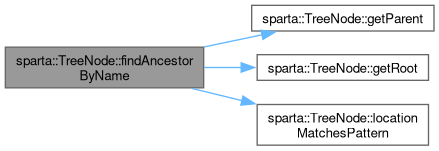
| sparta::TreeNode * | findAncestorByName (const std::string &name) |
| Find ancestor by name. | |
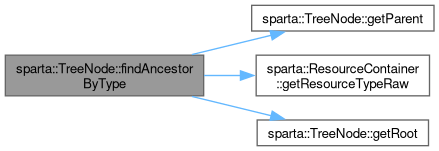
| template<typename T > | |
| sparta::TreeNode * | findAncestorByType () |
| Find ancestor by type. | |
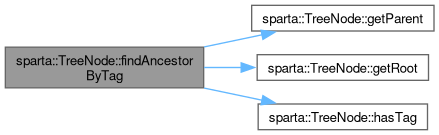
| sparta::TreeNode * | findAncestorByTag (const std::string &tag) |
| Find the first ancestor with a particular tag. | |
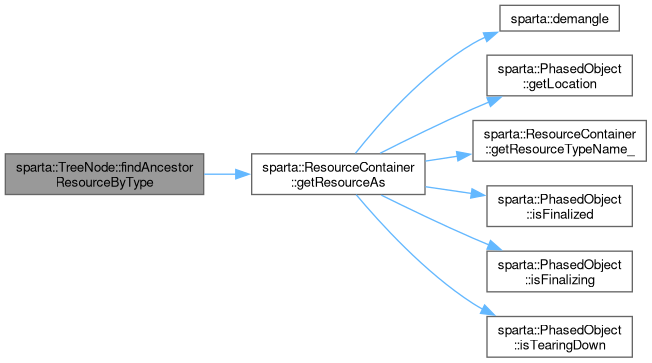
| template<typename T > | |
| T * | findAncestorResourceByType () |
| Find an ancestor's resource with a certain type. | |
| const AliasVector & | getAliases () const |
| Gets a vector of all aliases of this node. | |
| uint32_t | getChildrenIdentifiers (std::vector< std::string > &idents, bool ignore_builtin_group=true) const |
| Gets all child identifiers, aliases, group names, and group-aliases which can be used to refer to a child of this node. | |
| std::vector< const std::string * > | getIdentifiers () const |
| Gets all the identifiers for this node (excluding groups) | |
| uint32_t | getGroupSize (const std::string &group) |
| Gets the number of nodes in a group. | |
| group_idx_type | getGroupIndexMax (const std::string &group) |
| Gets the largest index of a node in the given group. | |
| uint32_t | getGroup (const std::string &group, std::vector< TreeNode * > &results) |
| Gets all nodes in a child group. | |
| uint32_t | findChildren (const std::string &pattern, std::vector< TreeNode * > &results, std::vector< std::vector< std::string > > &replacements) |
| Finds all children starting at this node with a given pattern relative to this node by matching names an aliases. Appends each found child to <results>. | |
| uint32_t | findChildren (const std::string &pattern, std::vector< TreeNode * > &results) |
| Version of findChildren with no replacements vector. | |
| virtual uint32_t | findImmediateChildren_ (std::regex &expr, std::vector< TreeNode * > &found, std::vector< std::vector< std::string > > &replacements, bool allow_private=false) |
| Finds immediate children with some identity (name or alias) matching a regex. | |
| uint32_t | findImmediateChildren_ (std::regex &expr, std::vector< TreeNode * > &found, bool allow_private=false) |
| Variant of findImmediateChildren_ with no replacements vector. | |
| virtual uint32_t | findImmediateChildren_ (std::regex &expr, std::vector< const TreeNode * > &found, std::vector< std::vector< std::string > > &replacements, bool allow_private=false) const |
| Const-qualified variant of findImmediateChildren_. | |
| uint32_t | findImmediateChildren_ (std::regex &expr, std::vector< const TreeNode * > &found, bool allow_private=false) const |
| Variant of const-qualified findImmediateChildren_ with no replacements vector. | |
| bool | locationMatchesPattern (const std::string &pattern, const TreeNode *pat_loc) const |
| Determines if the given pattern (which may contain wildcards) can describe this node. | |
| TreeNode * | getChild (const std::string &name, bool must_exist=true) |
| Retrieves a child with this dotted path name. | |
| const TreeNode * | getChild (const std::string &name, bool must_exist=true) const |
| Overloaded const-qualified. | |
| std::string | getDeepestMatchingPath (const std::string &path) const |
| Gets the deepest whole node location starting from this node that matches some part of path starting at its beginning. | |
| bool | hasChild (const std::string &name) const noexcept |
| Determines if a child can be found with the given dotted path. | |
| bool | hasImmediateChild (const TreeNode *n) const noexcept |
| Determines if the node n is an immediate child of this node. | |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type, class ConstT = typename ptr_to_const_obj_ptr<T>::type> | |
| const ConstT | getChildAs (const std::string &name, bool must_exist=true) const |
| Retrieves a child that is castable to T with the given dotted path. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| const T * | getChildAs (const std::string &name, bool must_exist=true) const |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| T | getChildAs (const std::string &name, bool must_exist=true) |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| T * | getChildAs (const std::string &name, bool must_exist=true) |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type, class ConstT = typename ptr_to_const_obj_ptr<T>::type> | |
| ConstT | getAs () const |
| Retrieves this node after casting to type T. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| const T * | getAs () const |
| Retrieves this node after casting to type const T. | |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| T | getAs () |
| Retrieves this node after casting to type const T. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| T * | getAs () |
| Retrieves this node after casting to type const T. | |
| uint32_t | findChildrenByTag (const std::string &tag, std::vector< TreeNode * > &results, int32_t max_depth=-1) |
| Finds a set of all children having the selected tag which this node or descendants of this node within a distance of the given max_depth. | |
| bool | isDescendantOf (const TreeNode *ancestor, int32_t max_depth=-1) const |
| Determines if this node is a descendant of the specified ancestor node within some number of generations (depth). | |
| std::string | getLocation () const override final |
| std::string | getDisplayLocation () const |
| Returns the location of this node in the device tree which might not be usable for navigating the device tree (it cannot be used as an argument for getChild/findChildren). | |
| std::string | getExpectedLocation () const |
| build-time equivalent to getLocation before an object is actually attached to a tree. This is a mainly a framework and debugging tool for determining what the location of a node currently being constructed will be when complete. | |
| std::string | renderSubtree (int32_t max_depth=-1, bool show_builtins=false, bool names_only=false, bool hide_hidden=false, bool(*leaf_filt_fxn)(const TreeNode *)=nullptr) const |
| Renders the subtree starting at this node as a string containing an indentation-based depth-first representation. | |
| uint32_t | getLevel () const |
| Gets the level of this node. 0 is root. | |
| template<typename T > | |
| uint32_t | getRecursiveNodeCount () const |
| Recursively gets the count of a nodes that are a subclass of a particular type (determined by dynamic_cast). Includes all descendants of this node in the tree, but excludes this node. | |
| static TreeNode * | getVirtualGlobalNode () |
| Gets the virtual global node singleton. This node can have no parent and no children. It receives notifications from all nodes in the simulator as if it were the parent of every node in the simulation that has no parent. | |
Public Notification System | |
| uint32_t | getPossibleNotifications (std::vector< NotificationInfo > &infos) const |
| Gets information on the possible notifications generated by this node (excludes children). | |
| void | dumpPossibleNotifications (std::ostream &o) const noexcept |
| Dumps a listing of the notifications which this node can generate to the ostream o. | |
| template<typename DataT = ANY_TYPE> | |
| uint32_t | locateNotificationSources (std::vector< TreeNode * > &nodes, const std::string &name="") |
| Gets all possible notification info from NotificationSources within this node's subtree. | |
| template<typename DataT = ANY_TYPE> | |
| void | dumpLocatedNotificationSources (std::ostream &o, const std::string &name="") |
| Retrieves the relevant NotificationSources from locateNotificationSources and prints them to the output o. | |
| uint32_t | getPossibleSubtreeNotifications (std::vector< NotificationInfo > &infos) const noexcept |
| Gets information on the possible notifications generated by this node and all its descendants. | |
| void | dumpPossibleSubtreeNotifications (std::ostream &o) const noexcept |
| Dumps a listing of the notifications which this node and its descendants can generate to the ostream o. | |
| bool | canGenerateNotification (const std::type_info &tinfo, const std::string *name) const |
| Can this TreeNode generate a notification of the given type having the given name or pattern. | |
| bool | canGenerateNotification (const std::type_info &tinfo, const std::string &name) const |
| Can this TreeNode generate a notification of the given type having the given name (does not require interned string - will intern automatically with StringManager). | |
| bool | canGenerateNotification (const NotificationInfo &info) const |
| Can this TreeNode generate a notification of the given NotificationInfo. | |
| bool | canSubtreeGenerateNotification (const std::type_info &tinfo, const std::string *name) const |
| Can this TreeNode or its descendants (of any distance) generate a notification of the given type having the given name. | |
| bool | canSubtreeGenerateNotification (const std::type_info &tinfo, const std::string &name) const |
| Can this TreeNode or its descendants (of any distance) generate a notification of the given type having the given name (does not require interned string) | |
| bool | canSubtreeGenerateNotifications (const std::type_info &tinfo, const std::vector< const std::string * > &names) const |
| Checks to see if any a subtree can generate any of several notification names which may be patterns. | |
| template<typename DataT , typename T , void(T::*)(const TreeNode &, const TreeNode &, const DataT &) TMethod> | |
| void | registerForNotification (T *obj, const std::string &name, bool ensure_possible=true) |
| Registers a callback method to listen for all notifications having the specified data type DataT and name (or any name if name is "") occuring on this node or any descendant (subtree). | |
| template<typename DataT , typename T , void(T::*)(const DataT &) TMethod> | |
| void | registerForNotification (T *obj, const std::string &name, bool ensure_possible=true) |
| template<typename DataT , typename T , void(T::*)(const TreeNode &, const TreeNode &, const DataT &) TMethod> | |
| void | deregisterForNotification (T *obj, const std::string &name) |
| Removes at most one registration made with registerForNotification. | |
| template<typename DataT , typename T , void(T::*)(const DataT &) TMethod> | |
| void | deregisterForNotification (T *obj, const std::string &name) |
| bool | hasObserversRegisteredForNotification (const std::type_info &tinfo, const std::string *name) const noexcept |
| Determines if this TreeNode (not descendants) has any observers for this type of event and name. | |
| void | getDelegatesRegisteredForNotification (const std::type_info &tinfo, const std::string *name, std::vector< delegate > &dels) noexcept |
| Gets the vector of delegates registered for a notification on this TreeNode. | |
| static std::vector< const std::string * > | parseNotificationNameString (const std::string &csl) |
| Parses a comma-separated list of notification names (or patterns) separated by commas and ignoring whitespace around commas. | |
| static bool | notificationCategoryMatch (const std::string *query_id, const std::string *node_id) |
| Checks if two notification categories match where one is an actual category. | |
Detailed Description
Node in a composite tree representing a sparta Tree item.
- Warning
- TreeNode construction is NOT thread-safe
- Note
- Children cannot be removed from their parents once attached
- Not all TreeNodes in existance are required to be part of the same tree.
- TreeNodes expect to be attached to a root node. See sparta::RootTreeNode for details. This root is required to act on the tree and hold some tree-wide properties. Multiple RootTreeNodes are expected to exist.
Because this class expects to be used with a composite pattern, several refinements exist elsewhere in sparta.
Important
Searching and getting child nodes is done by getChild, findChildren, and getChildAt only.
Teardown
TreeNodes cannot be removed from the tree once added until the Tree enters the TREE_TEARDOWN phase (see isTearingDown). Place the Tree's RootTreeNode into the teardown phase using sparta::RootTreeNode::enterTeardown.
Definition at line 203 of file TreeNode.hpp.
Member Typedef Documentation
◆ AliasVector
| std::vector<std::string> sparta::TreeNode::AliasVector |
Vector of aliases (other names for this node)
Definition at line 247 of file TreeNode.hpp.
◆ ChildNameMapping
| std::multimap<std::string, TreeNode*> sparta::TreeNode::ChildNameMapping |
Mapping of names, aliases, and groups to individual child nodes within one node. This must be in a deterministic order, so an ordered container (e.g. std::map) is required. A sorted contained is probably desirable, but not required.
Definition at line 255 of file TreeNode.hpp.
◆ ChildrenVector
| std::vector<TreeNode*> sparta::TreeNode::ChildrenVector |
Vector of TreeNode children.
Definition at line 242 of file TreeNode.hpp.
◆ ConstWeakPtr
| std::weak_ptr<const TreeNode> sparta::TreeNode::ConstWeakPtr |
Weak pointer to a const TreeNode. Acquire with getWeakPtr.
Definition at line 270 of file TreeNode.hpp.
◆ DelegateVector
|
protected |
Vector of delegates representing a list of observers to notify.
Definition at line 3277 of file TreeNode.hpp.
◆ ExtensionsBase
| using sparta::TreeNode::ExtensionsBase = detail::ExtensionsBase |
Definition at line 1882 of file TreeNode.hpp.
◆ group_idx_type
| uint32_t sparta::TreeNode::group_idx_type |
Index within a group.
Definition at line 260 of file TreeNode.hpp.
◆ node_uid_type
| uint64_t sparta::TreeNode::node_uid_type |
Type of unique-identifier assigned to every node.
Definition at line 237 of file TreeNode.hpp.
◆ NotificationObserverMap
|
protected |
Map of delegate vectors containing all observers.
Definition at line 3282 of file TreeNode.hpp.
◆ SharedPtr
| std::shared_ptr<TreeNode> sparta::TreeNode::SharedPtr |
Shared pointer to TreeNode. Acquire with WeakPtr::lock().
Definition at line 275 of file TreeNode.hpp.
◆ TagsMap
| std::map<const std::string*, std::vector<TreeNode*> > sparta::TreeNode::TagsMap |
Map of strings (interned in StringManager) tags to TreeNodes.
Definition at line 280 of file TreeNode.hpp.
◆ WeakPtr
| std::weak_ptr<TreeNode> sparta::TreeNode::WeakPtr |
Weak pointer to a TreeNode. Acquire with getWeakPtr.
Definition at line 265 of file TreeNode.hpp.
Constructor & Destructor Documentation
◆ TreeNode() [1/7]
| sparta::TreeNode::TreeNode | ( | TreeNode && | rhp | ) |
Move constructor.
◆ TreeNode() [2/7]
| sparta::TreeNode::TreeNode | ( | TreeNode * | parent, |
| const std::string & | name, | ||
| const std::string & | group, | ||
| group_idx_type | group_idx, | ||
| const std::string & | desc, | ||
| bool | is_indexable ) |
TreeNode full constructor. Initializes node and adds it as a child of an existing tree node (if parent is not null).
- Warning
- Subclasses should generally not use this constructor (or should pass a null parent instead) because this constructor can invoke addChild, which notifies observers that a child or parent is being added. Observers of these notifications tend to require fully constructed clases because they dynamically cast the TreeNode pointer to the intended tree type to find out its actual type. Then, it may examine the fields of the TreeNode subclass which may not yet be fully populated.
- Parameters
-
parent TreeNode to which this will be added as a child. If this constructor is being invoked by a subclass, parent must be nullptr (or use a constructor with no parent argument). Subclass constructor is then responsible for adding the node. name Name of this node. Name must satisfy validateName. May be NODE_NAME_NONE to indicate anonymous node. A group and group index is required for anonymous nodes. name must not be the same as any alias or name of another child of parent. It is HIGHLY recommended that name end in a number if there are multiple instances of similar objects at the same level in the tree (e.g. core0, core1). Even if only one such object exists at some level in the tree, having a numeric suffix now will ensure it is easy to adapt Python scripts to handle muliple instanecs later. group Group name of this node. Must satisfy validateGroup. May be GROUP_NAME_NONE if a valid node name is given and group_idx == GROUP_IDX_NONE. group_idx Group index within group. Must satisfy validateGroup. Must be GROUP_IDX_NONE unless group != GROUP_NAME_NONE. desc Description of this TreeNode. Must satisfy validateDesc is_indexable Is this node indexable by its parent such that it can be accessed by group and index. Set this to false if children will have colliding group numbers and indexes (e.g. a banked register set). In almost all cases, this should be true.
- Note
- TreeNode construction is NOT thread safe
Example 1: Using groups to identify a sequence of related elements
* // given TreeNode* parent with name "parent" * TreeNode foo2(&parent, "foo2", "foo", 2, "This is a Foo...") * TreeNode foo3(&parent, "foo3", "foo", 3, "This is a Foo...") *
In a Python shell atop sparta, might allow the following means of accessing foo:
* >>> parent.foo * <Group of 2 Nodes> * >>> parent.foo2 # Node name * <foo2 node> * >>> parent.foo3 * <foo3 node> * >>> parent.foo[2] # Node group[index] * <foo2 node> * >>> parent.foo[3] * <foo3 node> * >>> for n in parent.foo: print n # Iterate Node group * <foo2 node> * <foo3 node> * \endvarbatim * * <h4>Example 2: Using groups for Nodes which have no siblings</h4> * Even if you will only have one node having a certain name prefix at * some point in the sparta tree (e.g. "soc"), it may make sense to make * it indexable. One day, a multi-soc/board simulation may need to be * created. * \verbatim * // given TreeNode* parent with name "parent" * TreeNode foo(&parent, "foo", "foo", 0, "This is a Foo...") *
In a Python shell atop sparta, might allow the following means of accessing foo:
* >>> parent.foo # Name * <foo node> * >>> parent.foo[0] # Group * <foo node> * >>> for f in parent.foo: print f * <foo node> *
◆ TreeNode() [3/7]
| sparta::TreeNode::TreeNode | ( | TreeNode * | parent, |
| const std::string & | name, | ||
| const std::string & | group, | ||
| group_idx_type | group_idx, | ||
| const std::string & | desc ) |
TreeNode constructor with no is_indexable parameter [defaults to true].
- See also
- other sparta::TreeNode constructors
◆ TreeNode() [4/7]
| sparta::TreeNode::TreeNode | ( | const std::string & | name, |
| const std::string & | group, | ||
| group_idx_type | group_idx, | ||
| const std::string & | desc ) |
TreeNode constructor with no parent Node.
- See also
- other sparta::TreeNode constructors
◆ TreeNode() [5/7]
| sparta::TreeNode::TreeNode | ( | TreeNode * | parent, |
| const std::string & | name, | ||
| const std::string & | desc ) |
TreeNode constructor with no group information.
- See also
- other sparta::TreeNode constructors
- Warning
- Subclasses should generally not use this constructor (or should pass a null parent instead) because this constructor can invoke addChild, which requires a TreeNode subclass (at this) to be fully constructed
group defaults to GROUP_NAME_NONE. group_idx defaults to GROUP_IDX_NONE.
◆ TreeNode() [6/7]
| sparta::TreeNode::TreeNode | ( | TreeNode * | parent, |
| const std::string & | group, | ||
| group_idx_type | group_idx, | ||
| const std::string & | desc ) |
TreeNode constructor for anonymous node with group information.
- See also
- other sparta::TreeNode constructors
- Note
- group and group_idx must be valid
- Warning
- Subclasses should generally not use this constructor (or should pass a null parent instead) because this constructor can invoke addChild, which requires a TreeNode subclass (at this) to be fully constructed
Name defaults to NODE_NAME_NONE. group and group_idx should be meaningful
◆ TreeNode() [7/7]
| sparta::TreeNode::TreeNode | ( | const std::string & | name, |
| const std::string & | desc ) |
TreeNode constructor with no parent node or group information.
- See also
- other sparta::TreeNode constructors
group defaults to GROUP_NAME_NONE. group_idx defaults to GROUP_IDX_NONE.
◆ ~TreeNode()
|
virtual |
Virtual destructor.
- Exceptions
-
SpartaException if node is attached to a root (via isAttached) and tree is not in TREE_TEARDOWN phase
Member Function Documentation
◆ activateLink()
|
virtual |
Activate one of the links added with addLink.
- Parameters
-
label The label of the tree node
What it means to activate a link can differ from simulator to simulator and each simulator that use the link notion is free to define the semantics of the link and what it means to active a link.
In case this method is not overriden, we assume that it has a resource and will let its resource know about what tree nodes are being shadowed.
◆ addAlias()
| void sparta::TreeNode::addAlias | ( | const std::string & | alias | ) |
Add a single alias for this node.
- Parameters
-
alias Alias to assign to this node. alias is subject to the same constraints as a node name and must satisfy validateName. Additionally, aliases must not be empty strings
- Precondition
- Node must not yet have a parent. When adding a node as a child, the parent checks for alias, name, group, and group+idx collisions amongst all its children
- No alias with the same name may be present in this node
- alias cannot match any name, alias, or group of another child of this node's parent.
- Tree cannot be built (Not having a parent should hide this precondition)
◆ addAliases()
| void sparta::TreeNode::addAliases | ( | const AliasVector & | v | ) |
Adds each element of a vector of aliases to this node..
- Parameters
-
v Vector of alias strings. Each alias in the vector is subject to the conditions of addAlias
- Precondition
- See addAlias
◆ addChild() [1/2]
| void sparta::TreeNode::addChild | ( | TreeNode & | child | ) |
AddChild by reference for convenience.
Overloads addChild(TreeNode* child)
◆ addChild() [2/2]
| void sparta::TreeNode::addChild | ( | TreeNode * | child, |
| bool | inherit_phase = true ) |
Adds a TreeNode to this node as a child.
- Precondition
- All subblasses of this instance should be constructed before calling this methods and none should be destructed. This ensures that the onAddingChild_ and onSettingParent_ callback hooks can be invoked with a child having valid RTTI data. See the C++11 standard: 12.7 Construction and destruction [class.cdtor] Paragraph 3.
- Parameters
-
child borrowed pointer to TreeNode to add as a child. child must not already be a parent of *this. child cannot already be an immediate child of *this. Child cannot have the same name or alias as another name or alias of a child of *this (group names may be repeated though). Child must not be nullptr. inherit_phase Does the child inherit its phase from the parent This should be true in almost all uses of the framework
- Warning
- child is a borrowed reference - child is not copied. child lifetime must exceed that of this instance.
- Postcondition
- Child must be added to this node and have this node set as its parent.
- New child will be added to the end of the list. This is important for finalization because new nodes can be added while nodes are being iterated.
- Exceptions
-
SpartaException if the child cannot be added for any reason.
- Warning
- Do not call unless all subblasses of this instance have begun construction. No subclasses have completed destruction. This ensures that the onAddingChild_ and onSettingParent_ callback hooks can be invoked with a child having valid RTTI data. See the C++11 standard: 12.7 Construction and destruction [class.cdtor] Paragraph 3
Invokes onAddingChild_ before finally attaching the child. This gives subclasses a chance to either reject the node or perform some local actions like caching the child or determining its type.
Invokes setParent_ on the child which handles passing information about the new parent-child relationship to child's subtree.
◆ addExtension()
|
inline |
Add an extension, specifying the ExtensionsBase subclass type. Forward any arguments needed to your subclass extension's constructor. The typical use case for addExtension() over the other apis is that these extensions are meant to be dynamic-only (on-demand only), bypassing the finalizeTree() checks that all extension parameters have been read. You can call addExtension() whenever you want.
- Note
- Instead of subclassing directly from ExtensionsBase, it is more common to subclass ExtensionsParamsOnly.
- Exceptions
-
Throws if Extension::NAME is already an extension on this node. Use replaceExtension() instead.
Definition at line 2038 of file TreeNode.hpp.

◆ addExtensionFactory()
| void sparta::TreeNode::addExtensionFactory | ( | const std::string & | extension_name, |
| std::function< ExtensionsBase *()> | factory ) |
Add an extension factory to this tree node by its type (name).
- Note
- This MUST be called before or during buildTree_() (TREE_BUILDING phase).
- getRoot() MUST be of type RootTreeNode.
- Extensions are created automatically if provided in –extension-file, –arch, –config-file, or –node-config-file.
- If not provided in one of the above YAML files, getExtension(name) will always return nullptr.
◆ addLink()
|
virtual |
Link this tree node with another tree node.
- Parameters
-
node The tree node to link with label The label of the tree node
This method is a generic interface for linking a tree node to other tree nodes. Linking is not bi-directinal, linking a tree node A with tree node be by calling this method on A, links A with B but not B with A.
In case this method is not overriden, we assume that it has a resource and will let its resource know about what tree nodes are being shadowed.
Reimplemented in sparta::MirrorNotificationSource< NotificationDataT >.
◆ addTag()
| void sparta::TreeNode::addTag | ( | const std::string & | tag | ) |
Adds single tag to this node.
- Parameters
-
tag Tag to add to this node. Tag is subject to the same constraints as a node name and must satisfy validateName. Additionally, tags must not be empty strings
- Note
- Tags cannot be removed once added
- Precondition
- Tree cannot be in or past TREE_FINALIZED phase
- No tag by this name may already be present. Since tag data may come from multiple places in the simulator source code, tags of the same name may have different semantics depending on who added them. This test ensures that one node does not have tags (meta-data) with conflicting semantics. Generally, the client should add each tag only once without checking to see if it already present. This will identify duplicate tags having different semantics
- Postcondition
- Adds tag to global_tags_map_. See findChildrenByTag
◆ addTags()
| void sparta::TreeNode::addTags | ( | const std::vector< std::string > & | v | ) |
Adds each elements of a vector of tags to this node.
- Parameters
-
v Vector of tag strings. Each tag in the vector is subject to the conditions of addTag
- Precondition
- See addTag
◆ areParametersLocked_()
|
inlineprotected |
This method informs whether the tree is past the lockdown phase for all LOCKED and HIDDEN parameters. Modifying LOCKED and HIDDEN parameters after this phase is disallowed. Tree can be locked down during TREE_BUILDING phase or TREE_CONFIGURING phase. During TREE_FINALIZING phase, all parameters are locked down as is.
Definition at line 2949 of file TreeNode.hpp.
◆ bindTreeEarly_()
|
protected |
Recursively invoke TreeNode::onBindTreeEarly_ and Resource::onBindTreeEarly_ (in that order for each node)
◆ bindTreeLate_()
|
protected |
Recursively invoke TreeNode::onBindTreeEarly_ and Resource::onBindTreeLate_ (in that order for each node)
◆ broadcastDeregistrationForNotificationListStringToChildren_()
|
inlineprotected |
Symmetric oppostie of broadcastRegistrationForNotificationListStringToChildren_.
Definition at line 3433 of file TreeNode.hpp.
◆ broadcastDeregistrationForNotificationToChildren_()
|
protectedvirtual |
Recursively notifies children that the notification described has lost one particular observer (del) which was observing at the observation point TreeNode obs_node with the delegate del.
This is the symmetric opposite of broadcastRegistrationForNotificationToChildren_
Override to use a non-standard child-list. By default, this method simply iterates this node's children and call itself recursively for each
◆ broadcastRegistrationForNotificationListStringToChildren_()
|
inlineprotected |
Entry point to broadcastRegistrationForNotificationToChildren_ recursion. Breaks a name string.
Definition at line 3417 of file TreeNode.hpp.
◆ broadcastRegistrationForNotificationToChildren_()
|
protectedvirtual |
Recursively notifies children that the notification described is now (or still is) being observed at the observation point TreeNode obs_node with the newly registered delegate del.
- Parameters
-
[in] tinfo Type info of the notification [in] name_ids vector of pointers to names or glob-like treenode identifier patterns. that may or may not be interned with sparta::StringManager. [in] obs_node Node at which observer was installed [in] del Delegate to invoke when the notification posts
This method allows Notification nodes to keep a map of which TreeNodes are observing observing a notification and what delegates are registered to observe that notification. The delegates can then be invoked directly by notification sources when appropriate notifications are posted.
Override to use a non-standard child-list. By default, this method simply iterates this node's children.
◆ canGenerateNotification() [1/3]
| bool sparta::TreeNode::canGenerateNotification | ( | const NotificationInfo & | info | ) | const |
Can this TreeNode generate a notification of the given NotificationInfo.
- Note
- Also checks origin to ensure that it points to this node.
◆ canGenerateNotification() [2/3]
| bool sparta::TreeNode::canGenerateNotification | ( | const std::type_info & | tinfo, |
| const std::string & | name ) const |
Can this TreeNode generate a notification of the given type having the given name (does not require interned string - will intern automatically with StringManager).
This is a version of the other canGenerateNotification function which does not require name to be a string interned with StringManager. Though the other variant is faster, this can be more convenient.
◆ canGenerateNotification() [3/3]
| bool sparta::TreeNode::canGenerateNotification | ( | const std::type_info & | tinfo, |
| const std::string * | name ) const |
Can this TreeNode generate a notification of the given type having the given name or pattern.
- Parameters
-
tinfo type_info from typeid on the type of notification being queried. name Pointer to interned name or pattern of notifications to query (from StringManager::internString). If This value is StringManager::EMPTY, looks for notifications having any name. glob-like patterns are supported (see matchesGlobLike).
- Returns
- true if this node can post a notification having the given type T where tinfo=typeid(T) and having a notification name matching the parameter 'name'. If the parameter 'name' is StringManager::EMPTY, matches on any notification name.
- Note
- This method is effectively a const expression - It will invariably return the same result for the same inputs.
Example
◆ canSubtreeGenerateNotification() [1/2]
| bool sparta::TreeNode::canSubtreeGenerateNotification | ( | const std::type_info & | tinfo, |
| const std::string & | name ) const |
Can this TreeNode or its descendants (of any distance) generate a notification of the given type having the given name (does not require interned string)
This is a version of the other canGenerateNotification function which does not require name to be a string interned with StringManager. Though the other variant is faster, this can be more convenient.
◆ canSubtreeGenerateNotification() [2/2]
| bool sparta::TreeNode::canSubtreeGenerateNotification | ( | const std::type_info & | tinfo, |
| const std::string * | name ) const |
Can this TreeNode or its descendants (of any distance) generate a notification of the given type having the given name.
- Parameters
-
tinfo type_info from typeid on the type of notification being queried. name Pointer to interned name of notifications to query about (from StringManager::internString). If This value is StringManager::EMPTY, looks for notifications having any name.
- Returns
- true if this node can post a notification having the given type T where tinfo=typeid(T) and having a notification name matching the parameter 'name'. If the parameter 'name' is StringManager::EMPTY, matches on any notification name.
- Warning
- This searches the entire subtree and can be slow.
Uses canGenerateNotification at each node to check. Returns on first match.
Example
◆ canSubtreeGenerateNotifications()
| bool sparta::TreeNode::canSubtreeGenerateNotifications | ( | const std::type_info & | tinfo, |
| const std::vector< const std::string * > & | names ) const |
Checks to see if any a subtree can generate any of several notification names which may be patterns.
- See also
- canSubtreeGenerateNotifications
◆ createExtension() [1/3]
|
inline |
Create an extension on demand without needing to specify any particular extension name. If the arch/config/extension YAML input files have exactly one extension configured for this TreeNode, that extension will be created.
- Parameters
-
replace If true, remove any existing extension of the same name before creating a new one. If false, returns the existing extension if one exists.
- Note
- If 'this' tree node was not given an extension in any of the –extension-file, –arch, –config-file, or –node-config-file YAML files, then this will always return nullptr.
- Does not require a registered extension factory. If no factory exists for the resolved extension name, returns an ExtensionsParamsOnly. Otherwise, returns an extension subclass created by the factory.
- Exceptions
-
If 'this' tree node was given more than one extension in the input YAML files, this will always throw an exception.
Definition at line 2011 of file TreeNode.hpp.

◆ createExtension() [2/3]
|
inline |
- See also
- createExtension(std::string extension_name, bool replace)
Definition at line 2020 of file TreeNode.hpp.

◆ createExtension() [3/3]
|
inline |
Create an extension on demand. This is useful if you want to add an extension to a node that was not specified in any of the –extension-file, –arch, –config-file, or –node-config-file YAML files.
- Parameters
-
extension_name The name of the extension to create. replace If true, remove any existing extension of the same name before creating a new one. If false, returns the existing extension if one exists.
- Note
- Does not require a registered extension factory. If no factory exists for the given name, returns an ExtensionsParamsOnly. Otherwise, returns an extension subclass created by the factory.
Definition at line 1987 of file TreeNode.hpp.

◆ createSearchRegexPattern()
|
static |
Compute a regex pattern for a node child path containing any number of wildcard characters (not a dot-separated location) which can be used to test against child node names.
- Parameters
-
pat Pattern for searching immediate children (e.g. "core*" or "core0")
- Note
- The caller is responsible for parsing a location string into alphanumeric child strings.
- See also
- hasWildcardCharacters
◆ deregisterForNotification() [1/2]
|
inline |
Removes at most one registration made with registerForNotification.
- See also
- REGISTER_FOR_NOTIFICATION
Refer to registerForNotification for more information about parameters. To deregister an observer delegate registered through registerForNotification, pass the same arguments.
Definition at line 3896 of file TreeNode.hpp.
◆ deregisterForNotification() [2/2]
|
inline |
Definition at line 3903 of file TreeNode.hpp.
◆ dumpDebugContent_()
|
protectednoexcept |
Allows resources to write out detailed textual debugging information about the node. This is typically called by a simulator when shutting down due to an exception (or depending on simulator config). However, it could also be called at other times.
- Parameters
-
out Output osteam to which this node should write all of its debug state. Note that this is not necessarily the same ostream for all nodes and resources, so this should not be shared.
- Precondition
- Simulator can be in any phase
- Note
- The entire resource tree is accessible. Nothing has been destructed yet
- If you need to print a message
- Do not throw here. If simulation state is invalid, that should be detected in validatePostRun_.
- The simulator will not continue to run for this device tree at this point.
- Conventionally, this method should write to out only. Writing entirely new files from this method is unexpected by the user and violates one of the design principals of this library where the only simulator input and output files and named explicitly by the user. If you must create a new file, please name it clearly.
- Exceptions
-
Must not throw!
◆ dumpLocatedNotificationSources()
|
inline |
Retrieves the relevant NotificationSources from locateNotificationSources and prints them to the output o.
- Template Parameters
-
DataT type of notification to search for or ANY_TYPE. See locateNotificationSource.
- Parameters
-
o ostream to write found nodes to.
Definition at line 3673 of file TreeNode.hpp.

◆ dumpPossibleNotifications()
|
noexcept |
Dumps a listing of the notifications which this node can generate to the ostream o.
- Parameters
-
o ostream to which the notification info list will be dumped
◆ dumpPossibleSubtreeNotifications()
|
noexcept |
Dumps a listing of the notifications which this node and its descendants can generate to the ostream o.
- Parameters
-
o ostream to which the noitification info list will be dumped
◆ enterConfig_()
|
protectednoexcept |
Recursively enter TREE_CONFIGURING phase.
- Exceptions
-
Cannot throw /post res_ of this node contains allocated Resource unless there was an exception
◆ enterFinalized_()
|
protected |
Recursively enter TREE_FINALIZED phase.
- Exceptions
-
SpartaException if already in TREE_FINALIZED phase or beyond
- Note
- Can be called multiple times if tree did not fully finalize.
- Postcondition
- All nodes in three are set to TREE_FINALIZED phase
◆ enterFinalizing_()
|
protected |
Recursively enter TREE_FINALIZING phase.
- Exceptions
-
SpartaException already in TREE_FINALIZING phase or beyond
- Postcondition
- All nodes in tree are set to TREE_FINALIZED phase
◆ enterTeardown_()
|
protectednoexcept |
Recursively enter TREE_TEARDOWN phase while alerting nodes through onEnteringTeardown_ and alterting Resources through Resource::onStartingTeardown_. Nodes already in TREE_TEARDOWN phase will not be alerted (neither will their associated Resources). All nodes are visited regardless of their parent's phase.
- Exceptions
-
Cannot throw
◆ finalizeTree_()
|
protected |
Recursively create resources based on tree configuration. enter_finalize_ should be invoked after this method successfully completes for an entire tree. Finalizes in the order of construction.
- Exceptions
-
exception if there is an error anywhere in the finalization procedure. No actions are rolled-back, but this method can be called again.
◆ findAncestorByName()
|
inline |
Find ancestor by name.
- Parameters
-
name The name of the ancestor, can include wildcards understood by Sparta
- Returns
- If found, ancestor's TreeNode, otherwise nullptr
Definition at line 1153 of file TreeNode.hpp.
◆ findAncestorByTag()
|
inline |
Find the first ancestor with a particular tag.
- Parameters
-
tag the tag we are searching for.
This method will traverse up the tree until it finds a TreeNode who's tag matches the searched tag. This does not, by any means, guarantee that the resource is actually available yet.
- Returns
- a pointer to the treenode with tag or nullptr if not found.
Definition at line 1202 of file TreeNode.hpp.
◆ findAncestorByType()
|
inline |
Find ancestor by type.
- Template Parameters
-
T The Resource type to check for
- Returns
- If found, ancestor's TreeNode, otherwise nullptr
This method will traverse up the tree until it finds a TreeNode who's resource type matches the given type. This does not, by any means, guarantee that the resource is available for obtaining.
- Warning
- If your resource inherits from some base class, passing T=your base class will not find the result. For this case, consider using findAncestorByTag, and add a tag to your base.
Definition at line 1180 of file TreeNode.hpp.
◆ findAncestorResourceByType()
|
inline |
Find an ancestor's resource with a certain type.
- Template Parameters
-
T the resource type you'd like to return.
- Returns
- if found a pointer to the closest ancestor's resource of type T. nullptr otherwise.
This method is similar to findAncestorByType but will return the parent's resource instead.
Definition at line 1225 of file TreeNode.hpp.
◆ findChildren() [1/2]
|
inline |
Version of findChildren with no replacements vector.
Definition at line 1430 of file TreeNode.hpp.
◆ findChildren() [2/2]
|
inline |
Finds all children starting at this node with a given pattern relative to this node by matching names an aliases. Appends each found child to <results>.
- Note
- this is not a full recursive search. All children found will be N levels below this node whrere N Is dependent on the number of '.' tokens in the search string.
- Parameters
-
pattern Search pattern in a restricted glob format. results All children with identifiers matching the pattern (alias or name) are appended to the back of this vector. Order of results appended is implementation dependent and not guaranteed consistent. All children found from this invocation of findChildren (and any deeper recursion) will be adjacent in <results>. replacements Vector of replacements made on wildcards in path in order to find children. For each result added to results, a vector element is added to replacements. That vector element vector contains as many replacements as there are wildcards in the pattern. To clarify results.size()=replacements.size() and If replacements.size() > 1, replacements[0].size() is the number of wildcards in pattern.
- Postcondition
- Appends all children that match pattern to results (does not clear). Order of children appended is not defined or guaranteed to be consistent.
- Warning
- May return duplicates if any upward traversal is done after multiple downward traversal (e.g. pattern is '..a'). This occurs since each of the N children found with "</em>" recognizes the upward search pattern '.' (after another '.') and searches the parent for "a".
- May return duplicates if multiple aliases refer to the same TreeNode.
- Returns
- The number of children found and appended to results.
- Note
- This is not full path matching . Patterns are extracted between each '.' and the ends of the pattern string. Each of these Extracted patterns is used to search in the current search context and either find the new child/parent to search within OR (if the end of the whole pattern has been reached), to find a node to add to the results output vector
-
This method is not
constto allow the caller to modify the found TreeNodes
- Exceptions
-
Does not throw. May print a warning when a pattern attempts to search up and the current node has no parent.
- See also
- locationMatchesPattern
The following glob wildcard patterns are supported
- ? Match 0 or 1 characters
- * Match 0 or more characters
The following additional patterns are supported
- + One or more characters
The following glob patterns are not supported
- {}
- []
- \ (since all names involved in search are alphanumeric and underscore)
For example:
Definition at line 1420 of file TreeNode.hpp.
◆ findChildrenByTag()
| uint32_t sparta::TreeNode::findChildrenByTag | ( | const std::string & | tag, |
| std::vector< TreeNode * > & | results, | ||
| int32_t | max_depth = -1 ) |
Finds a set of all children having the selected tag which this node or descendants of this node within a distance of the given max_depth.
- Parameters
-
tag Nodes having this tag will be placed into results vector results Vector of to which all results found by this method will be appended. This vector is not cleared max_depth Maximum depth of a ancestor/descendant relationship when filtring children. 0 means that any nodes returned must be the node on which this method is invoked, 1 means that any nodes returned can be this or immediate children, and so on. A max_depth of -1 means that there is no limit on ancestor-descendant distance
This search works by searching the global tag map for the specified tag and then filtering this list for nodes which are a descendants of the node on which this method is invoked.
◆ findDelegate_() [1/2]
|
inlineprotected |
Finds a delegate associated with the given type T, object pointer, DataT, and TMethod within a DelevateVector. The intent of this function is to help see if a delegate is already registered with a calback by checking all known information associated with that callback against the input arguments.
- Parameters
-
[in] dvec Vector of delegates to search [in] obj Object which owns the delegate [in] target_name Name or pattern of notification type. that this is used as-is.
- Returns
- Iterator within delegate vector parameter dvec. Will be a valid iterator if no matching delegate is found. Otherwise, will be dvec.end().
- Note
- Performs string comparison for delegate target name
Definition at line 3337 of file TreeNode.hpp.
◆ findDelegate_() [2/2]
|
inlineprotected |
Definition at line 3352 of file TreeNode.hpp.
◆ findImmediateChildren_() [1/2]
|
virtual |
Const-qualified variant of findImmediateChildren_.
Reimplemented in sparta::VirtualGlobalTreeNode.
◆ findImmediateChildren_() [2/2]
|
virtual |
Finds immediate children with some identity (name or alias) matching a regex.
- Parameters
-
expr Expression to match with child node identities found All nodes with matching identities are appended to this vector. This vector is not cleared
- Returns
- Number of children found in this call
- Note
- Does not recurse
Reimplemented in sparta::VirtualGlobalTreeNode.
◆ getAliases()
| const AliasVector & sparta::TreeNode::getAliases | ( | ) | const |
Gets a vector of all aliases of this node.
- Note
- This is a const vector matching the order and content of the internal alias list
- Returns
- const vector of alias strings referring to this node
◆ getAllConfigExtensionNames()
|
inline |
Get a list of extension names found for this node in all arch/config/extension files.
- Note
- If you want a list of extension names for instantiated extensions that exist already on this node, call the method getAllInstantiatedExtensionNames().
Definition at line 2110 of file TreeNode.hpp.

◆ getAllExtensions()
|
inline |
Get a map of extensions for this node.
Definition at line 2133 of file TreeNode.hpp.
◆ getAllInstantiatedExtensionNames()
|
inline |
Get a list of extension names for all instantiated extensions on this TreeNode.
- Note
- If you want a list of extension names found for this node in any arch/config/extension input YAML file, call the method getAllConfigExtensionNames().
Definition at line 2095 of file TreeNode.hpp.

◆ getAs() [1/4]
|
inline |
Retrieves this node after casting to type const T.
- Template Parameters
-
T Type of child expected
- Returns
- const T* if this node was castable to const T* using dynamic_cast.
- Exceptions
-
SpartaException if this node could not be cast to T
- Warning
- This method performs a dynamic cast (for now) and should not be used in performance-critical code
Overload of getAs for non-const access with pointer T type.
Definition at line 1711 of file TreeNode.hpp.
◆ getAs() [2/4]
|
inline |
Retrieves this node after casting to type const T.
- Template Parameters
-
T Type of child expected
- Returns
- const T* if this node was castable to const T* using dynamic_cast.
- Exceptions
-
SpartaException if this node could not be cast to T
- Warning
- This method performs a dynamic cast (for now) and should not be used in performance-critical code
Overload of getAs for non-const access with non-pointer T type
Definition at line 1734 of file TreeNode.hpp.

◆ getAs() [3/4]
|
inline |
Retrieves this node after casting to type T.
- Template Parameters
-
T Type of child expected
- Returns
- T* if this node was castable to T* using dynamic_cast.
- Exceptions
-
SpartaException if this node could not be cast to T
- Warning
- This method performs a dynamic cast (for now) and should not be used in performance-critical code
This could eventually be optimized or used to provide meaningful errors by storing type information in TreeNode.
Definition at line 1673 of file TreeNode.hpp.
◆ getAs() [4/4]
|
inline |
Retrieves this node after casting to type const T.
- Template Parameters
-
T Type of child expected
- Returns
- const T* if this node was castable to const T* using dynamic_cast.
- Exceptions
-
SpartaException if this node could not be cast to T
- Warning
- This method performs a dynamic cast (for now) and should not be used in performance-critical code
Overload of getAs for const access with a pointer T type.
Definition at line 1696 of file TreeNode.hpp.

◆ getChild() [1/2]
|
inline |
Retrieves a child with this dotted path name.
- Note
- this is not a full recursive search. The child, if found, will be N levels below this node where N Is dependent on the number of '.' tokens in the search string.
- Parameters
-
name path to child. This may be a single name or a dotted path refering to a node several levels below this node. must_exist If true, requires the child to exist by throwing an exception if it does not. If false, allows the method to return nullptr when no child is found.
- Returns
- A valid TreeNode* if child is found by name. If child cannot be found and must_exist==true, throws SpartaException. Otherwise returns nullptr.
- Note
- no pattern matching supported in this method
- if a name matches on both an alias and a TreeNode name, the TreeNode name will take precedence
- Exceptions
-
SpartaException if child is not found and must_exist==true
Example:
Definition at line 1530 of file TreeNode.hpp.
◆ getChild() [2/2]
|
inline |
Overloaded const-qualified.
Definition at line 1537 of file TreeNode.hpp.
◆ getChildAs() [1/4]
|
inline |
Definition at line 1633 of file TreeNode.hpp.
◆ getChildAs() [2/4]
|
inline |
Definition at line 1654 of file TreeNode.hpp.
◆ getChildAs() [3/4]
|
inline |
Retrieves a child that is castable to T with the given dotted path.
- Template Parameters
-
T Type of child expected
- Parameters
-
name Name of child. May be a dotted path indicating multiple levels of device-tree traversal. must_exist If true, Causes an exception to be thrown if no child by this name could be found. If false, a nullptr is returned. Finding a child and failing to cast to T always causes an exception to be thrown
- Returns
- T* if a child of the correct name is found and it was castable to T* using dynamic_cast. If child cannot be found and must_exist==true, throws SpartaException. Otherwise returns nullptr.
- Note
- no pattern matching supported in this method, but dotted paths are acceptable.
- Exceptions
-
SpartaException if must_exist==true and either the child by the given name (path) could not be found or the found node was not castable to T
Definition at line 1605 of file TreeNode.hpp.
◆ getChildAs() [4/4]
|
inline |
Definition at line 1627 of file TreeNode.hpp.
◆ getChildAt()
| TreeNode * sparta::TreeNode::getChildAt | ( | uint32_t | idx | ) | const |
Gets a child at a position in the children vector in the order in which they were added to this node.
- Warning
- Do not use this method for iterating child nodes for the purpose of searching. Use getChild* and findChildren* methods instead.
- Exceptions
-
SpartaException if idx is out of range.
This method is for iteration-purposes only (so that wrappers may avoid STL). The index used here is NOT a consistent property with any TreeNode or Resource.
◆ getChildren() [1/2]
| const ChildrenVector sparta::TreeNode::getChildren | ( | ) | const |
Gets a vector of all children of this node in any group in the order in which they were added to this node.
- Note
- This is a const vector matching the order and content of the internal child list.
- Warning
- Do not use this method for iterating child nodes for the purpose of searching. Use getChild* and findChildren* methods instead.
- Returns
- const vector of TreeNode* children
- Warning
- This will only return the public children. Private children must be accessed via the TreeNodePrivateAttorney available to the framework for traversing the entire tree, public and private.
◆ getChildren() [2/2]
| uint32_t sparta::TreeNode::getChildren | ( | std::vector< TreeNode * > & | results, |
| bool | ignore_builtin_group = true, | ||
| bool | ignore_anonymous_nodes = true ) |
Gets all children of this node in the order in which they were added to this node.
- Parameters
-
results Vector to which all children will be appended. This vector is not result. ignore_builtin_group Ignore any children in group GROUP_NAME_BUILTIN. ignore_anonymous_nodes Ignore any children in group GROUP_NAME_
- Returns
- Number of children found
- Warning
- This will only return the public children. Private children must be accessed via the TreeNodePrivateAttorney available to the framework for traversing the entire tree, public and private.
◆ getChildrenIdentifiers()
| uint32_t sparta::TreeNode::getChildrenIdentifiers | ( | std::vector< std::string > & | idents, |
| bool | ignore_builtin_group = true ) const |
Gets all child identifiers, aliases, group names, and group-aliases which can be used to refer to a child of this node.
- Parameters
-
idents Vector to fill with new identities. Vector is not cleared. ignore_builtin_group=true If true, rejects the builtin group.
- Returns
- Number of identifiers added to idents
- Postcondition
- idents will be cleared and populated with names, aliases, and group names within this node.
- Note
- Order of names retrieved should be considered random. Ordering is subject to change between calls due to use of a hash map internally.
- Warning
- Groups cannot currenly be retrieved by getChild. Do not iterate these idents and invoke getChild.
- Todo
- Allow groups to be retrieved witih getChild
- Note
- This method copies many strings. It should not be considered fast.
- Anonymous children names will not appear in this list. Their group and aliases will, however.
This is useful for shell completion when browsing the children of a node.
◆ getChildrenOfType()
|
inline |
return all the children matching a particular type using dynamic cast.
- Warning
- This will only return the public children. Private children must be accessed via the TreeNodePrivateAttorney available to the framework for traversing the entire tree, public and private.
Definition at line 1135 of file TreeNode.hpp.

◆ getClock() [1/2]
|
inline |
Definition at line 2256 of file TreeNode.hpp.
◆ getClock() [2/2]
|
inlineoverridevirtual |
Walks up parents (starting with self) until a parent with an associated local clock is found, then returns that clock.
- Returns
- The clock of the first ancestor (including self) which has a valid clock through getLocalClock. If no ancestor has a clock, returns nullptr
- See also
- getLocalClock
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Implements sparta::ResourceContainer.
Definition at line 2236 of file TreeNode.hpp.
◆ getDeepestMatchingPath()
| std::string sparta::TreeNode::getDeepestMatchingPath | ( | const std::string & | path | ) | const |
Gets the deepest whole node location starting from this node that matches some part of path starting at its beginning.
- Parameters
-
path Path to node relative this this node.
- Returns
- Dotted node path to the deepest ancestor of this node whose location matches path from the beginning. If the node described by path exists, returns the a path to the node identified by path. Note that the returned string could differ in this case if path contained aliases.
- Warning
- This is an expensive operation as it is a recursive search. It should not be called at run-time.
Ths intent of this is to find out where a path given by a user (e.g. configuration file) diverged from the actual tree for feedback purposes
◆ getDelegatesRegisteredForNotification()
|
noexcept |
Gets the vector of delegates registered for a notification on this TreeNode.
- Parameters
-
tinfo typeid of the notification to be queried name Name of the notification to be queried (Can be "" to ignore name) dels Vector to which all found delegates matching search parameters will be appended. This vector is not cleared
◆ getDesc()
| const std::string & sparta::TreeNode::getDesc | ( | ) | const |
Gets the description of this node.
- Returns
- string description of this node
◆ getDisplayLocation()
| std::string sparta::TreeNode::getDisplayLocation | ( | ) | const |
Returns the location of this node in the device tree which might not be usable for navigating the device tree (it cannot be used as an argument for getChild/findChildren).
- Returns
- Location string that is nice for presentation, even if not progamatically useful in the getChild/findChildren methods.
This differs from getLocation by representing nodes with groups and no names as "group[group_index]" instead of "name". This string cannot currently be used to find children by pattern or name because it refers to a group.
A motifivation for this method is to allow identification of elements in anonymous buffers and queue resources to simulator tools.
◆ getExtension() [1/4]
| ExtensionsBase * sparta::TreeNode::getExtension | ( | ) |
Get an extension without needing to specify any particular extension name. If no extensions exist, returns nullptr. If only one extension exists, returns that extension. If more than one extension exists, throws an exception.
- Note
- If 'this' tree node was not given an extension in any of the –extension-file, –arch, –config-file, or –node-config-file YAML files, then this will always return nullptr. If you want to create an extension for this node on demand, call createExtension(name).
◆ getExtension() [2/4]
| const ExtensionsBase * sparta::TreeNode::getExtension | ( | ) | const |
Get an extension without needing to specify any particular extension name. If no extensions exist, returns nullptr. If only one extension exists, returns that extension. If more than one extension exists, throws an exception.
- Note
- If 'this' tree node was not given an extension in any of the –extension-file, –arch, –config-file, or –node-config-file YAML files, then this will always return nullptr. If you want to create an extension for this node on demand, call createExtension(name).
- Unlike the non-const version, this method will never create the extension automatically under the hood, nor will it cache the extension for performance.
◆ getExtension() [3/4]
|
inline |
Get an extension object by extension name.
- Parameters
-
extension_name The name of the extension to find
- Note
- If 'this' tree node was not given an extension in any of the –extension-file, –arch, –config-file, or –node-config-file YAML files, then this will always return nullptr. If you want to create an extension for this node on demand, call createExtension(name).
Definition at line 1921 of file TreeNode.hpp.

◆ getExtension() [4/4]
|
inline |
Get an extension object by extension name.
- Parameters
-
extension_name The name of the extension to find no_factory_ok If true, and this tree node was in one of the arch/config/extension YAML input files, and no factory exists for the extension name, return a configured ExtensionsParamsOnly.
- Note
- If 'this' tree node was not given an extension in any of the –extension-file, –arch, –config-file, or –node-config-file YAML files, then this will always return nullptr. If you want to create an extension for this node on demand, call createExtension(name).
Definition at line 1907 of file TreeNode.hpp.

◆ getExtensionAs() [1/2]
|
inline |
Get an extension, downcast to the given type.
- Exceptions
-
Throws an exception if the extension exists, but the downcast failed.
Definition at line 1932 of file TreeNode.hpp.

◆ getExtensionAs() [2/2]
|
inline |
Get an extension, downcast to the given type.
- Exceptions
-
Throws an exception if the extension exists, but the downcast failed.
Definition at line 1942 of file TreeNode.hpp.

◆ getGroup() [1/2]
| const std::string & sparta::TreeNode::getGroup | ( | ) | const |
◆ getGroup() [2/2]
| uint32_t sparta::TreeNode::getGroup | ( | const std::string & | group, |
| std::vector< TreeNode * > & | results ) |
Gets all nodes in a child group.
- Parameters
-
group Name of group to get children from. If GROUP_NAME_NONE, will retrieve only children with group=GROUP_NAME_NONE. results Vector of nodes to which results will be appended.
- Returns
- Number of nodes found in the group
- Todo
- Optimize lookup by group using mappings
To get all children regardless of group, use getChildren
◆ getGroupIdx()
| group_idx_type sparta::TreeNode::getGroupIdx | ( | ) | const |
◆ getGroupIndexMax()
| group_idx_type sparta::TreeNode::getGroupIndexMax | ( | const std::string & | group | ) |
Gets the largest index of a node in the given group.
- Parameters
-
group Name of group to get the index from.
- Returns
- Largest group index in the given group, including anonymous nodes. If group is GROUP_NAME_NONE, searches for nodes with that group name (not in a group). If there are no nodes in the chosen group, returns GROUP_NAME_NONE.
- Todo
- Optimize this count by storing group mappings
◆ getGroupNamePtr()
| const std::string * sparta::TreeNode::getGroupNamePtr | ( | ) | const |
Gets the group name string pointer (interned in StringManager singleton) of this node.
- Returns
- string pointer to group name of this node which can be compared with other strings interned in StringManager
- See also
- GROUP_NAME_NONE
◆ getGroupSize()
| uint32_t sparta::TreeNode::getGroupSize | ( | const std::string & | group | ) |
Gets the number of nodes in a group.
- Parameters
-
group Name of group to get children from. If GROUP_NAME_NONE, will retrieve only children with group=GROUP_NAME_NONE.
- Returns
- Number of children in this group, including anonymous nodes. Aliases do not affect this result
To count all children regardless of group, use getNumChildren
◆ getIdentifiers()
| std::vector< const std::string * > sparta::TreeNode::getIdentifiers | ( | ) | const |
Gets all the identifiers for this node (excluding groups)
- Returns
- A vector of string pointers. Elements are guaranteed to be non-null
- Warning
- These identifiers are pointers to strings in members and vectors of this TreeNode instance. Altering the name or aliases or group of this Node will invalidate the result vector of this call
- The returned vector is re-built each call
◆ getLevel()
| uint32_t sparta::TreeNode::getLevel | ( | ) | const |
Gets the level of this node. 0 is root.
- Warning
- This can change when the node is connected to a tree. Generally, this should only be queried once the Tree has exited the TREE_FINALIZED phase because level cannot cahnge after finalization. (see isFinalized)
This is computed based on the number of parents iterated until a node with no parents is reached.
◆ getLocalClock() [1/2]
|
inline |
Gets the clock associated directly with this Node. This is useful for configuration and simulator debug, but not at run-time.
- Note
- In general, it is preferable to use getClock to find the closest attached clock in this Node's ancestry.
- Returns
- Clock directly attached to this Node (if any). Returning nullptr means no attached clock, however this Node is considered to be within the nearest ancestor's clock. getClock will find nearest ancestor's clock (or local clock, if present)
By default TreeNodes are not associated (or required to be associated) with a sparta::Clock. Subclasses may require this, however.
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 2286 of file TreeNode.hpp.
◆ getLocalClock() [2/2]
|
inline |
Definition at line 2293 of file TreeNode.hpp.
◆ getLocation()
|
finaloverridevirtual |
Implements sparta::PhasedObject.
◆ getName()
|
overridevirtual |
◆ getNamePtr()
| const std::string * sparta::TreeNode::getNamePtr | ( | ) | const |
Gets the name of this node's string pointer which isinterned in StringManager)
- Returns
- String pointer. Guaranteed not to be null
◆ getNextName()
|
static |
Gets the next name between two '.' chars in a string starting at pos.
- Parameters
-
name Name string to parse pos Position in name to begin parsing. Will be updated to location of the next '.' found plus 1.
- Returns
- String between pos and the next '.' found.
Used for parsing tree paths:
◆ getNumChildren()
| uint32_t sparta::TreeNode::getNumChildren | ( | ) | const |
Gets the number of children that this node has including those in the sparta builtins group.
- Returns
- Integer representing number of children in any group.
- Warning
- This will only return the public children. Private children must be accessed via the TreeNodePrivateAttorney available to the framework for traversing the entire tree, public and private.
◆ getNumExtensions()
|
inline |
Get the number of extensions for this node.
- Note
- This refers to the number of instantiated extensions on this node.
Definition at line 2123 of file TreeNode.hpp.

◆ getParent() [1/2]
|
inlinevirtual |
Gets immediate parent of this node if one exists.
- Returns
- parent TreeNode if there is one. Otherwise returns 0.
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Reimplemented in sparta::GlobalTreeNode, sparta::RootTreeNode, and sparta::VirtualGlobalTreeNode.
Definition at line 964 of file TreeNode.hpp.
◆ getParent() [2/2]
|
inlinevirtual |
Definition at line 971 of file TreeNode.hpp.
◆ getParentAs() [1/4]
|
inline |
Definition at line 1009 of file TreeNode.hpp.
◆ getParentAs() [2/4]
|
inline |
Definition at line 1023 of file TreeNode.hpp.
◆ getParentAs() [3/4]
|
inline |
Retrieves a parent casted to type T* if this node has a parent.
- Template Parameters
-
T Type of parent to cast to
- Parameters
-
must_exist If true, Causes an exception to be thrown if node has no parent or the parent cannot be dynamically cast to T*. If false, a nullptr is returned when this node has no parent that can be cast to T*.
- Returns
- Parent as a T* if the parent exists and was castable to T* using dynamic_cast. If this node has no parent which can be cast to T*, and must_exist == true, throws. Otherwise, returns nullptr
- Exceptions
-
SpartaException if must_exist==true and the parent was null or the parent could not be cast to a T*.
Definition at line 989 of file TreeNode.hpp.
◆ getParentAs() [4/4]
|
inline |
Definition at line 1003 of file TreeNode.hpp.
◆ getPossibleNotifications()
| uint32_t sparta::TreeNode::getPossibleNotifications | ( | std::vector< NotificationInfo > & | infos | ) | const |
Gets information on the possible notifications generated by this node (excludes children).
- Parameters
-
infos Vector of notification inormation to which this node's information will be added
- Returns
- Number of infos appended to the infos vector.
- Postcondition
- infos has NotificationInfo instances appended. Original content remains in place. Vector can only grow.
◆ getPossibleSubtreeNotifications()
|
noexcept |
Gets information on the possible notifications generated by this node and all its descendants.
- Parameters
-
infos Vector of notification information to which this node's information will be added
- Returns
- Number of infos appended to the infos vector
- Postcondition
- infos has NotificationInfo instances appended from this node and all descendants. Vector can only grow.
◆ getPreviousName_()
|
staticprotected |
Gets the previous name between two '.' chars in a string starting at pos.
- Parameters
-
name Name string to parse pos Position in name to begin parsing in reverse. Must coincide with a '.' or end of string. Will be updated to location of the next '.' found. Set to npos if the beginning of the string is reached. To start parsing a string from the end, should be set to length of string.
- Returns
- String between (excluding) pos and the '.' found earlier in the string.
Used for parsing tree paths:
◆ getRecursiveNodeCount()
|
inline |
Recursively gets the count of a nodes that are a subclass of a particular type (determined by dynamic_cast). Includes all descendants of this node in the tree, but excludes this node.
Definition at line 1853 of file TreeNode.hpp.
◆ getRoot()
|
virtual |
Gets farthest ancestor of this node.
- Returns
- farthest ancestor TreeNode. May be this if node has no parent. Return value will never be nullptr
- Note
- returned TreeNode may not be an actual RootTreeNode
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
◆ getScopeRoot() [1/2]
| TreeNode * sparta::TreeNode::getScopeRoot | ( | ) |
Returns the root of the scope that this tree node is in.
◆ getScopeRoot() [2/2]
| const TreeNode * sparta::TreeNode::getScopeRoot | ( | ) | const |
Returns the root of the scope that this tree node is in.
◆ getSimulation()
| app::Simulation * sparta::TreeNode::getSimulation | ( | ) | const |
Gets the simulation (if any) associated with this tree.
- Precondition
- This node should be attached (isAttached) or this will return nullptr
- Note
- Function gets RootTreeNode of tree and asks it for Simulation pointer (if any)
◆ getTags()
| const std::vector< const std::string * > & sparta::TreeNode::getTags | ( | ) | const |
Gets the set of tags associated with this TreeNode.
- Note
- This cannot change after finalization
- Returns
- const vector of const string pointers, which will never be null. These tags are stored as pointers into strings held by StringManager to save space and often improve comparison speed
Tags are useful for associating meta-data with a TreeNode and forming virtual groupings of nodes independent of hierarchy. For example, all nodes (e.g. counters and notification sources) having to do with power-modeling may have "power" tags indicating presence in a virtual "power" group.
◆ getVirtualGlobalNode()
|
static |
Gets the virtual global node singleton. This node can have no parent and no children. It receives notifications from all nodes in the simulator as if it were the parent of every node in the simulation that has no parent.
- Note
- Caller must not delete this node.
This node is typically used to add logging taps that receive messages before the entire device tree hierarchy is defined. This allows warning messages from a newly-constructed node to be sent somewhere, even before that node is part of any device tree.
◆ getWeakPtr()
| WeakPtr sparta::TreeNode::getWeakPtr | ( | ) |
Gets a weak pointer to this TreeNode. This weak pointer is guaranteed to expire when this TreeNode is destructed unless locked.
- Returns
- weak_ptr to this TreeNode. Guaranteed not to be expired at this time.
- Warning
- Do not store the shared_ptr result of a call to sparta::TreeNode::WeakPtr::lock because it will prevent weak references to this shared pointer from expiring when the TreeNode is actually deleted. Having a shared pointer to this node will NOT prevent its destruction
Example
◆ hasChild()
|
inlinenoexcept |
Determines if a child can be found with the given dotted path.
- Parameters
-
name Dotted path to child
- Note
- no pattern matching supported in this method. Child-finding behavior is the same as getChild
- Returns
- true if the child can be found, false if not.
- See also
- getChild
Definition at line 1570 of file TreeNode.hpp.
◆ hasExtension()
|
inline |
Check if this tree node has an extension by the given name.
Definition at line 2074 of file TreeNode.hpp.

◆ hasExtensionOfType()
|
inlinenoexcept |
Check if this tree node has an extension by the given name and type.
Definition at line 2083 of file TreeNode.hpp.

◆ hasImmediateChild()
|
noexcept |
Determines if the node n is an immediate child of this node.
- Parameters
-
n Node to test for child-ness of this
- Returns
- true if n is an immediate child; false if not.
◆ hasObserversRegisteredForNotification()
|
noexcept |
Determines if this TreeNode (not descendants) has any observers for this type of event and name.
- Parameters
-
tinfo typeid of the notification to be queried name Name of the notification to be queried (Can be "" to ignore name)
◆ hasTag()
| bool sparta::TreeNode::hasTag | ( | const std::string * | interned_tag_name | ) | const |
Does this node have a specific tag (by string pointer interned with StringManager). This is faster than the alternate hasTag method because it relies only on pointer comparisons.
- Parameters
-
[in] interned_tag_name Tag pointer. Caller must get this pointer argument from sparta StringManager or it may not match
◆ hasWildcardCharacters()
|
static |
Determines if a given node name has any wildcard characters which will be substituted in createSearchRegexPattern.
This is useful for identifying which nodes are patterns and which are concrete node names. It is important to keep this in ssync with createSearchRegexPattern
◆ identityMatchesPattern_()
|
staticprotected |
Performs pattern matching on a identity string.
- Parameters
-
ident Regex identity. This could be generated from an input glob pattern expr Expression to compare against ident replacements Returns each captured replacement of a in the expression
◆ invokeDelegatesOn_()
|
inlineprotected |
Protected wrapper for invokeDelegates_ which allows a TreeNode to invoke delegates on another TreeNode using itself as the origin.
- Parameters
-
to_invoke TreeNodes whose delegates will be invoked (those which are appropriate for the specified DataT and name_id)
See invokeDelegates_ for other argument semantics
Definition at line 3453 of file TreeNode.hpp.
◆ isAnonymous()
| bool sparta::TreeNode::isAnonymous | ( | ) | const |
Is this node anonymous.
- Returns
- true if node is anonymous
◆ isAttached()
|
inlinevirtual |
Is this node part of a device tree with a proper RootTreeNode at the root.
- Returns
- true if node is a child of a RootTreeNode regardless of how many tree levels separate them
Reimplemented in sparta::GlobalTreeNode, sparta::RootTreeNode, and sparta::VirtualGlobalTreeNode.
Definition at line 956 of file TreeNode.hpp.
◆ isBuiltin()
| bool sparta::TreeNode::isBuiltin | ( | ) | const |
Is this node in the builtins group.
- Returns
- true if this node is in the GROUP_NAME_BUILTIN group.
◆ isDescendantOf()
| bool sparta::TreeNode::isDescendantOf | ( | const TreeNode * | ancestor, |
| int32_t | max_depth = -1 ) const |
Determines if this node is a descendant of the specified ancestor node within some number of generations (depth).
- Parameters
-
ancestor TreeNode that will be tested for being a parent this TreeNode max_depth Maximum depth (distance) between ancestor and this node that will allow this test to return true. A more distance ancestor/descendant relationship will cause this method to false. A max depth of 0 implies this node and ancestor must be the same node, a max_depth of 1 means that the ancestor must be an immediate parent or self, 2 means parent of parent or closer, and so on. max_depth of -1 means no limit.
◆ isExpired()
| bool sparta::TreeNode::isExpired | ( | ) | const |
Is this expired (i.e. has it been the rhp of a move constructor)
- Returns
- true if node is expired
◆ isHidden()
| bool sparta::TreeNode::isHidden | ( | ) | const |
◆ isNodeConstructed()
|
static |
Is a given node constructed?
- Note
- This is used for debugging double-frees
◆ isScopeRoot()
|
inline |
Returns true if this tree node is a scope root
Definition at line 2220 of file TreeNode.hpp.
◆ locateNotificationSources()
|
inline |
Gets all possible notification info from NotificationSources within this node's subtree.
- Template Parameters
-
DataT type of data for which to search. This must be non-const, non-volatile, non-pointer, and non-reference.
- Parameters
-
nodes Result set of nodes to which all found nodes will be appended. This vector is not cleared. name Name of the NotificationSource to search for. Specifying "" locates any sourcee matching on DataT.
Example:
Definition at line 3647 of file TreeNode.hpp.

◆ locationMatchesPattern()
| bool sparta::TreeNode::locationMatchesPattern | ( | const std::string & | pattern, |
| const TreeNode * | pat_loc ) const |
Determines if the given pattern (which may contain wildcards) can describe this node.
- Parameters
-
pattern Pattern to compare this node's location against. This pattern CANNOT have any upward traversal (parent references). pat_loc TreeNode representing the starting point of pattern. This pat_loc node must be AT or ABOVE *this in the tree, otherwise this method will always report false.
- Note
- A surefire (but slower) way to implement this is to perform findChildren with the inputs and search the result set for *this. It is NOT trivial to write simple downward traversing comparison as one might expect because patterns can go down and then up. All of the paths downward must be tried even if they do not contain *this because a down,down,up,up,down pattern could go into a subtree which does not contain the target *this, but later come back up and then back down to *this.
- This is not able to cross virtual parent-child relationships (e.g. in VirtualGlobalNode)
- Exceptions
-
SpartaException if pattern contains upward traversal
Example:
◆ lockdownParameters()
|
inline |
Method to put the device tree in lockdown phase. All LOCKED and HIDDEN parameters are frozen after this point. Regular parameters are not affected by this phase. This method requires a Simulation pointer and will assert at compile time if anyone tries to lockdown the tree without the context of a Simulation.
Lockdown the tree node if Simulation is valid
Definition at line 429 of file TreeNode.hpp.
◆ makeSubtreePrivate()
|
inline |
Make the entire subtree private.
This will add 1 to privacy_level_ for every node below, this means it should work if B->C, where C is private on B, and B is added as a private child of A, A.privacy_level_ = 0, B.privacy_level_ = 1, C.privacy_level_ = 2 (C.privacy_level_ was previously == 1).
See documentation for the privacy_level_ variable to really understand what this is doing and why.
Definition at line 2203 of file TreeNode.hpp.
◆ matchesGlobLike()
|
static |
Determine if a glob-like search pattern matches some other string.
- Parameters
-
[in] pattern Glob-like pattern to search with. This is standard SPARTA tree identifier pattern syntax [in] other Other string with which pattern is being compared
- Returns
- true if pattern matches other, false if not.
◆ notificationCategoryMatch()
|
static |
Checks if two notification categories match where one is an actual category.
- Parameters
-
[in] query_id pointer to StringManager interned string which may be a single category or a glob-like pattern. If StringManager.EMPTY, matches all patterns. [in] node_id concrete category. This is a name, not a pattern.
◆ parseNotificationNameString()
|
static |
Parses a comma-separated list of notification names (or patterns) separated by commas and ignoring whitespace around commas.
- Parameters
-
[in] csl Comma-separated list (e.g. "a,b,foo*"). Most common case will be a single name with no commas
- Returns
- List of interned string pointers (through sparta::StringManager)
◆ postPropagatingNotification_()
|
inlineprotected |
Starts a notification propagating up the tree.
- Parameters
-
name_id Pointer to interned name in StringManager. Compared against delegate name. The pointer is treated like a numeric ID for comparison.
- Note
- Invokes propagateNotification_ on this node after validating, then invokes propagateNotification_ on the global virtual node.
Definition at line 3294 of file TreeNode.hpp.
◆ recursGetDeepestMatchingPath_()
|
protected |
Finds the deepest node path mathing the input path. Implements getDeepestMatchingPath.
- Returns
- pair containing <match depth, match path> relative to this node
◆ registerForNotification() [1/2]
|
inline |
Registers a callback method to listen for all notifications having the specified data type DataT and name (or any name if name is "") occuring on this node or any descendant (subtree).
- Note
- Some parameters of this method can be automatically filled-in using the REGISTER_FOR_NOTIFICATION macro.
- Template Parameters
-
DataT Type of data object given to the notification callback function registered. This type must be a C++ typename of a type which is copyable, non-const, non-reference, and non-pointer. Useful values for this type can be found by locating sparta::NotificationSource nodes throughout the device tree and then by looking at sparta::NotificationSource::getNotificationTypeName. Note that ANY_TYPE is not a valid argument for DataT. T Class of object on which callback member function will be invoked. TMethod member function pointer of class T that will be invoked when the specified notification is posted. This member function signature must be: ClassName::func(// TreeNode from which the notification originatedconst TreeNode& origin_node,// TreeNode at which the notifications was observed, causing this callbackconst TreeNode& observation_node,// Notification event dataconst datat& data)Node in a composite tree representing a sparta Tree item.Definition TreeNode.hpp:204
- Parameters
-
name Name of notification being observed. If name is "", all notifications having a data type of DataT will cause this callback to be notified. Locating a notificationSource in the device tree and and using sparta::NotificationSource::getNotificationName can help to determine useful values for name. ensure_possible If true, this method will check that one or more nodes in this node's subtree can generate the notification described by DataT and name. If false, this test is not performed.
- Exceptions
-
SpartaException if a ensure_possible=true and a registration is made on a DataT/name combination that cannot be posted by this the node's subtree (since there are no ancestor NotificationSource nodes).
- Note
- Cannot re-register with same arguments.
- Todo
- Faster attachment of delegates to children. There is notable performance impact today, however.
- Note
- This method is potentially slow because all children may be walked to build a notification shortcut list, which is an optimization for the performance-critical notification-posting code
- See also
- REGISTER_FOR_NOTIFICATION
NotificationSources can be located throughout the simulation using the sparta::TreeNode::locateNotificationSources method.
The methods getPossibleSubtreeNotifications and dumpPossibleSubtreeNotifications can assist in finding NotificationSource nodes in the device tree.
Example:
Definition at line 3874 of file TreeNode.hpp.
◆ registerForNotification() [2/2]
|
inline |
Definition at line 3881 of file TreeNode.hpp.
◆ removeChildForTeardown_()
|
protected |
"Removes" the given child by invoking onDestroyingChild_ then removing this child from the children_ list
- Precondition
- Must be in teardown phase if this node is attached (isAttached)
- Parameters
-
child Child to remove from this node. Must actually be a current child of SpartaException is thrown
- Warning
- It is not currently safe to continue accessing a tree from which a child was removed. This is a teardown utility for breaking parent-child references which can confuse the notification system during random-order desstruction of the tree. This method DOES NOT allow removal of nodes at runtime because it does not erase all traces of the child. For example, the name map will still exist with dangling pointers. A more thorough removal method is required to actually support removal
- Note
- This method does not care about phase. Presuably it will only be called from TreeNode destructors, which will detect any phase problems.
- Exceptions
-
SpartaException if child is not an actual child of this node
◆ removeExtension()
|
inline |
Remove an extension by its name. Returns true if successful, false if the extension was not found.
Definition at line 2065 of file TreeNode.hpp.

◆ removeFromParentForTeardown_()
|
protected |
Protected Wrapper for getParent()->removeChildForTeardown_ which allows subclases of TreeNode to indirectly invoke removeChildForTeardown_ with themselves as the argument.
- Parameters
-
parent Parent to remove this child from. Must be this TreeNode's parent. Must not be nullptr
◆ renderSubtree()
| std::string sparta::TreeNode::renderSubtree | ( | int32_t | max_depth = -1, |
| bool | show_builtins = false, | ||
| bool | names_only = false, | ||
| bool | hide_hidden = false, | ||
| bool(* | leaf_filt_fxn )(const TreeNode *) = nullptr ) const |
Renders the subtree starting at this node as a string containing an indentation-based depth-first representation.
- Returns
- std::string representing the subtree.
- Parameters
-
max_depth Number of levels below this Node to traverse. 0 means this node only. Negative depth means no limit. show_builtins When false, hides all TreeNodes in the GROUP_NAME_BUILTIN group. If true, shows all nodes names_only When true, renders names of nodes. Otherwise, renders string representation of nodes prints only this node. hide_hidden Hides any nodes (and their subtrees) maked as hidden leaf_filt_fxn Filtering function. If nullptr, has no effect. If not nullptr, this function is invoked on each LEAF node encountered to determine whether it should be displayed. If this function returns false, the leaf node is not rendered. If true, the leaf node is rendered. Non-leaf nodes are not subject to filtering, but will be omitted if they contain no leaves (at any depth) which pass the leaf filter function. Note that max_depth prohibits recursion past a certain depth, so nodes may not be shown even if they have ancestor leaves that would be visible (according to the filter) but are below the max_depth threshold.
◆ replaceExtension()
|
inline |
Replace an extension, specifying the ExtensionsBase subclass type. This api is similar to addExtension() in that you do not have to read these parameters prior to finalizeTree() to avoid "unread unbound parameter" exceptions.
- Note
- If an extension with the name Extension::NAME already exists, it will be replaced. This api does not throw if there was no existing extension by the same name.
- Instead of subclassing directly from ExtensionsBase, it is more common to subclass ExtensionsParamsOnly.
Definition at line 2055 of file TreeNode.hpp.

◆ setClock()
|
virtual |
Assigns a clock to this node. This clock will then be accessed by any descendant which has no assigned clock or an ancestor with an assigned clock between that descendant and this node. getClock returns the Clock associated with the nearest ancestor.
- Parameters
-
clk Clock to assign. Must not be null.
- Precondition
- Must be in the TREE_BUILDING phase
- Can only assign a non-NULL value once
Reimplemented in sparta::RootTreeNode.
◆ setExpectedParent_()
|
protected |
Tracks a node as an expected parent without actually adding this node as a child. This is used almost exclusively for printing error messages which include a device-tree location BEFORE actually inserting this node into the device tree since node construction can fail.
- Parameters
-
parent Parent TreeNode that will act as the parent for the purposes of printing device-tree location for this node.
- Precondition
- Tree cannot already have a parent. It makes no sense to set an expected parent if the node alreay has a parent.
- Postcondition
- sparta::TreeNode::getLocation will reflect the location of this node as if it is part of the tree under the specified parent
- Note
- the expected parent node does not know about this instance.
- An expected parent does not cause this node to behave as if it is part of a tree except when printing a location.
- The expected parent will be set to nullptr once an actual parent is set through setParent_.
Typical usage is to invoke this at the very beginning of the constructor of a sparta::TreeNode subclass. This allows sparta::TreeNode::getLocation to function as if this node were actually part of a tree. After successful construction, addChild can be used to connect this node to a parent in the device tree. At that time, the expected parent is set back to nullptr.
Using an expected parent for the purposes of printing a device-tree location during construction is much cleaner and simpler than adding a child node to some parent and then trying to remove it if something goes wrong during construction.
◆ setScopeRoot()
|
inline |
Make this tree node the root of a scope
Definition at line 2211 of file TreeNode.hpp.
◆ simulationTerminating_()
|
protected |
Hook to allow simulation resources to clean-up before simulation is ended.
- Precondition
- Simulator will be in a state earlier than TREE_TEARDOWN phase
- Note
- The entire resource tree is accessible. Nothing has been destructed yet
- The simulator will not continue to run for this device tree at this point.
- This call may be followed by dumpDebugContent_ depending on the configuration of the simulator and any errors encountered.
- This call will be eventually followed by onEnteringTeardown_ unless the application is corrupted or hard-terminated (i.e. std::terminate, exit call, or exception in a destructor when unwinding)
- Exceptions
-
Any exceptions related to post-run state
◆ stringize()
|
inlinevirtual |
Create a string representation of this node.
- Parameters
-
pretty Print a more verbose, multi-line representaiton (if available).
- Returns
- string representation of this node "<" <location> ">"
- Note
- this representation contains some basic information and is not meant for deserialization.
Subclasses should override this with representations appropriate for their type.
Reimplemented in sparta::Clock, sparta::Counter, sparta::CounterBase, sparta::CycleCounter, sparta::DynamicResourceTreeNode< ResourceT, ParamsT >, sparta::EventSet, sparta::ExportedPort, sparta::GlobalTreeNode, sparta::log::MessageSource, sparta::memory::BlockingMemoryIFNode, sparta::NotificationSourceBase, sparta::ParameterBase, sparta::ParameterSet, sparta::Port, sparta::ReadOnlyCounter, sparta::Register, sparta::RegisterBase::Field, sparta::RegisterSet, sparta::ResourceTreeNode, sparta::RootTreeNode, sparta::StatisticDef, and sparta::StatisticSet.
Definition at line 722 of file TreeNode.hpp.

◆ stringizeTags()
|
inline |
Render tags to a string in the form: " tags:[tag0, tag1]" If there are any tags. The leading space makes this a useful sub-utility of stringize because if there are no tags, returns empty string with no leading space.
- Parameters
-
ss stringstream to write to
Definition at line 742 of file TreeNode.hpp.
◆ validateDesc()
| void sparta::TreeNode::validateDesc | ( | const std::string & | desc | ) |
Validates the given description string for this TreeNode.
- Precondition
- name_ must be assigned for this instance. It will be included in the exception message
- Exceptions
-
SpartaException if the string is invalid
Constraints:
- desc must not be empty
◆ validateGroup()
| void sparta::TreeNode::validateGroup | ( | const std::string & | name, |
| const std::string & | group, | ||
| group_idx_type | idx ) |
Validates the given group name string and group index for this TreeNode. Does not consider context (e.g. name collisions)
- Parameters
-
name Node name group Group name idx Group index
- Exceptions
-
SpartaException if the group name and group index combination is invalid (i.e. already used by another node)
Constraints:
- group must not exactly match any names in sparta::RESERVED_WORDS
- group must not begin with a decimal digit
- Name must not contain two adjacent underscores
- group must contain only alphanumeric characters and underscores (see sparta::ALPHANUM_CHARS).
- group cannot end with a decimal digit
- index must be sparta::TreeNode::GROUP_IDX_NONE if group is sparta::TreeNode::GROUP_NAME_NONE
- index must be sparta::TreeNode::GROUP_IDX_NONE if group is sparta::TreeNode::GROUP_NAME_BUILTIN.
- index must not be sparta::TreeNode::GROUP_IDX_NONE if group is not empty and not sparta::TreeNode::GROUP_NAME_BUILTIN.
- if node name is sparta::TreeNode::NODE_NAME_NONE, group must not be GROUP_NAME_NONE.
◆ validateName()
| void sparta::TreeNode::validateName | ( | const std::string & | nm | ) |
Validates the given name string for this TreeNode. Does not consider context (e.g. name collisions)
- Exceptions
-
SpartaException if the name is invalid.
Constraints:
- Name must not exactly match any names in sparta::RESERVED_WORDS
- Name must not begin with a decimal digit
- Name must not contain two adjacent underscores
- Name must contain only alphanumeric characters and underscores (see sparta::ALPHANUM_CHARS).
◆ validatePostRun_()
|
protected |
Hook to check the state of the simulator post-run and throw exceptions if something is incorrect.
- Precondition
- Simulator post-run sanity checking will be enabled. If not enabled, this will never be called
- Simulator will be in a state earlier than TREE_TEARDOWN phase
- Note
- The entire resource tree is accessible. Nothing has been destructed yet
- The simulator will not continue to run for this device tree at this point.
- This can be invoked multiple times during a simulation with different info content
- This call may be followed by dumpDebugContent_ depending on the configuration of the simulator and any errors encountered.
- This call will be eventually followed by onEnteringTeardown_ unless the application is corrupted or hard-terminated (i.e. std::terminate, exit call, or exception in a destructor when unwinding)
- Exceptions
-
Any exceptions related to post-run state
◆ validateTree_()
|
protected |
Iterates the finalized tree and validates each node (e.g. ensures statistics can be evaluated)
- Precondition
- Tree must be in TREE_FINALIZED phase
- Exceptions
-
SpartaException if any node cannot be validated
◆ verifyUniqueChildIdentifier_()
|
protected |
Verifies that the given identifier is unique for all children of this node by comparing against names, groups, and aliases. Throws SpartaException if not unique.
- Parameters
-
ident Identifier of child to check for uniqueness (e.g. a name or alias) ignore_group_collision If true, collisions of keys where the existing value in the names_ map is a Grouping are ignored. (default false: throw exception on collision).
- Exceptions
-
SpartaException if a ident is not unique.
Friends And Related Symbol Documentation
◆ ClockManager
|
friend |
Allow ClockManager to directly change phase on nodes.
Definition at line 216 of file TreeNode.hpp.
◆ SpartaStaticInitializer
|
friend |
This class is responsible for instantiating the static container held by this TreeNode.
Definition at line 222 of file TreeNode.hpp.
◆ TreeNodePrivateAttorney
|
friend |
Friend an attorney pattern that can expose access to getAllChildren_ or other methods that bypass privacy_level_.
Definition at line 228 of file TreeNode.hpp.
◆ VirtualGlobalTreeNode
|
friend |
Allow this class access internals for handling notification observation registration/deregistration broadcasts in a way that does not fit the composite tree pattern.
Definition at line 211 of file TreeNode.hpp.
Member Data Documentation
◆ CHILD_FIND_THRESHOLD
|
static |
Threshold for number of findChildren calls after finalization before a warning message is printed about framework misuse.
This value should be large enough that a few accesses by tools or lookups for caching pointers to other objects are allowed, but small enough that a findChildren call happening every N cycles of execution in the simulator will be detected during runs that take more than a few minutes. Consider that Parameters are also part of a tree and ParameterSet or RegisterSet nodes may be the target of some getChild calls after finalization, but generaly these nodes should be cached in the requesting component.
- Note
- Reports applied after starting can search the tree, causing many accesses. This constant requires a large value to not print warnings in this situation
- Todo
- getChild/findChildren should know the difference between report-based accesses and model-based accesses so that this can be conditionally incremented
Definition at line 391 of file TreeNode.hpp.
◆ CHILD_GET_THRESHOLD
|
static |
Threshold for number of getChild calls after finalization before a warning message is printed about framework misuse.
See CHILD_FIND_THRESHOLD for explanation of threshold value choice
Definition at line 399 of file TreeNode.hpp.
◆ DEBUG_DUMP_SECTION_DIVIDER
|
static |
String dividing sections in a debug dump file.
Definition at line 323 of file TreeNode.hpp.
◆ GROUP_IDX_NONE
|
static |
GroupIndex indicating that a node has no group index because it belongs to no group.
Definition at line 302 of file TreeNode.hpp.
◆ GROUP_NAME_BUILTIN
|
staticconstexpr |
Reserved name for built-in nodes.
Nodes in this group are exempt from certain restrictions and filtered from printing and searching operations.
Definition at line 369 of file TreeNode.hpp.
◆ GROUP_NAME_NONE
|
staticconstexpr |
Group name indicating that a node belongs to no group.
Definition at line 313 of file TreeNode.hpp.
◆ LOCATION_NODE_SEPARATOR_ATTACHED
|
staticconstexpr |
Separator character between node identifiers in a location string when the child is attached to the parent.
- Warning
- Do not change these as builtin logic and documentation depends on these constants.
Definition at line 336 of file TreeNode.hpp.
◆ LOCATION_NODE_SEPARATOR_EXPECTING
|
staticconstexpr |
Separator character between node identifiers in a location string when the child is being attached to the parent but has not been entirely attached (i.g. during construction of the child node)
- Warning
- Do not change these as builtin logic and documentation depends on these constants.
Definition at line 345 of file TreeNode.hpp.
◆ LOCATION_NODE_SEPARATOR_UNATTACHED
|
staticconstexpr |
Separator character preceding a node identifiers in a location string when that node has no parent and is not in the process of being attached to one.
- Warning
- Do not change these as builtin logic and documentation depends on these constants.
Definition at line 354 of file TreeNode.hpp.
◆ MAX_NODE_UID
|
static |
Maximum value of node_uid_ before the framework throws an exception.
Definition at line 308 of file TreeNode.hpp.
◆ NODE_NAME_NONE
|
staticconstexpr |
Node name for anonymous node.
Definition at line 318 of file TreeNode.hpp.
◆ NODE_NAME_VIRTUAL_GLOBAL
|
staticconstexpr |
Node name for the virtual glopbal node.
Definition at line 328 of file TreeNode.hpp.
◆ RENDER_SUBTREE_INDENT
|
static |
Spaces to indent for each tree level in sparta::TreeNode::renderSubtree.
- Note
- This is cosmetic only
Definition at line 361 of file TreeNode.hpp.
◆ TEARDOWN_ERROR_LIMIT
|
static |
Number of teardown-phase-related messages that can be printed before the rest will be suppressed.
Definition at line 405 of file TreeNode.hpp.
◆ TREE_NODE_PATTERN_SUBS
|
static |
List of pattern susbtitutions when creating a search pattern from a TreeNode name containing wildcards.
Definition at line 411 of file TreeNode.hpp.
The documentation for this class was generated from the following file:
- /github/workspace/sparta/sparta/simulation/TreeNode.hpp