TreeNode which represents the root ("top") of a device tree. More...
#include <RootTreeNode.hpp>
Public Types | |
| typedef NotificationSource< TreeNode > | NewDescendantNotiSrc |
| Type for notification source in this node which is posted when a new descendent is attached. | |
 Public Types inherited from sparta::TreeNode Public Types inherited from sparta::TreeNode | |
| typedef uint64_t | node_uid_type |
| Type of unique-identifier assigned to every node. | |
| typedef std::vector< TreeNode * > | ChildrenVector |
| Vector of TreeNode children. | |
| typedef std::vector< std::string > | AliasVector |
| Vector of aliases (other names for this node) | |
| typedef std::multimap< std::string, TreeNode * > | ChildNameMapping |
| Mapping of names, aliases, and groups to individual child nodes within one node. This must be in a deterministic order, so an ordered container (e.g. std::map) is required. A sorted contained is probably desirable, but not required. | |
| typedef uint32_t | group_idx_type |
| Index within a group. | |
| typedef std::weak_ptr< TreeNode > | WeakPtr |
| Weak pointer to a TreeNode. Acquire with getWeakPtr. | |
| typedef std::weak_ptr< const TreeNode > | ConstWeakPtr |
| Weak pointer to a const TreeNode. Acquire with getWeakPtr. | |
| typedef std::shared_ptr< TreeNode > | SharedPtr |
| Shared pointer to TreeNode. Acquire with WeakPtr::lock(). | |
| typedef std::map< const std::string *, std::vector< TreeNode * > > | TagsMap |
| Map of strings (interned in StringManager) tags to TreeNodes. | |
| using | ExtensionsBase = detail::ExtensionsBase |
| Public Types inherited from sparta::PhasedObject | |
| enum | TreePhase { TREE_BUILDING = 0 , TREE_CONFIGURING = 1 , TREE_FINALIZING = 2 , TREE_FINALIZED = 3 , TREE_TEARDOWN = 4 } |
| Current phase of tree construction (applies to node and entire tree). More... | |
Public Member Functions | |
| RootTreeNode (const std::string &name, const std::string &desc, app::Simulation *sim, GlobalTreeNode *search_scope) | |
| Constructor. | |
| RootTreeNode (const std::string &name, const std::string &desc, GlobalTreeNode *search_scope) | |
| Constructor with name, desc, and search scope. | |
| RootTreeNode (const std::string &name) | |
| Constructor with name only. | |
| RootTreeNode (const std::string &name, const std::string &desc, app::Simulation *sim) | |
| Consturctor with name, desc, and simulator. | |
| RootTreeNode (const std::string &name, const std::string &desc) | |
| Constructor with name and desc. | |
| RootTreeNode (app::Simulation *sim) | |
| Constructor with only a simulator. | |
| RootTreeNode (GlobalTreeNode *search_scope) | |
| Constructor with only a search scope. | |
| RootTreeNode (app::Simulation *sim, GlobalTreeNode *search_scope) | |
| Constructor with only a simulator and search scope. | |
| RootTreeNode () | |
| Default constuctor. | |
| virtual | ~RootTreeNode () |
| Destructor. | |
| virtual bool | isAttached () const override final |
| Is this node part of a device tree with a proper RootTreeNode at the root. | |
| virtual TreeNode * | getParent () override final |
| Gets immediate parent of this node if one exists. | |
| virtual const TreeNode * | getParent () const override final |
| virtual void | setClock (const Clock *clk) override final |
| Assigns a clock to this node. This clock will then be accessed by any descendant which has no assigned clock or an ancestor with an assigned clock between that descendant and this node. getClock returns the Clock associated with the nearest ancestor. | |
| app::Simulation * | getSimulator () const |
| Gets the simulator (if any) associated with this Root node. | |
| GlobalTreeNode * | getSearchScope () |
| Gets the search node "parent" of this root node which is suitable for performing searches that include the name of this root node (e.g. "top.x.y.z"). | |
| void | enterConfiguring () |
| Public method to crystalize the tree structure and begin configuring. | |
| void | enterFinalized (sparta::python::PythonInterpreter *pyshell=nullptr) |
| Public method for recursive tree finalization. Places tree temporarily into TREE_FINALIZING phase before finalizing, then places tree into TREE_FINALIZED. | |
| void | bindTreeEarly () |
| Public method for recursively giving all resources and nodes a chance to bind ports locally. Recurses depth first by order of construction of each child in each node encountered. | |
| void | bindTreeLate () |
| Public method for recursively giving all resources and nodes a chance to bind ports locally. Recurses depth first by order of construction of each child in each node encountered. | |
| void | simulationTerminating () |
| Called after simulation has stopped, but before statistic/report generation. | |
| void | validatePreRun () |
| Validate the entire tree immediately prior to running. All ports should be bound ,etc. Does not change phase. | |
| void | validatePostRun () |
| Validate all resources in the simulator, throwing exceptions if invalid state is detected. Exceptions are allowed to propogate out of this method. | |
| void | dumpDebugContent (std::ostream &out) noexcept |
| Dump all debug content from each resource in the tree to an ostream. | |
| void | enterTeardown () |
| Places this tree into TREE_TEARDOWN phase so that nodes may be deleted without errors. | |
| virtual std::string | stringize (bool pretty=false) const override |
| Render description of this RootTreeNode as a string. | |
Observation | |
| NewDescendantNotiSrc & | getNodeAttachedNotification () |
| Returns the post-write notification-source node for this register which can be used to observe writes to this register. This notification is posted immediately after the register has been written and populates a sparta::Register::PostWriteAccess object with the results. | |
Diagnostics | |
| void | getArchDataAssociations (std::vector< const ArchData * > &ad_this_tree, std::vector< const ArchData * > &ad_no_assoc, std::vector< const ArchData * > &ad_not_attached, std::vector< const ArchData * > &ad_other_tree) const noexcept |
| Gets vectors of all the ArchData instances in existance now categorized into several groups. Inputs are cleared before appending. | |
| void | validateArchDataAssociations () const |
| Gets the results. | |
| void | dumpArchDataAssociations (std::ostream &o) const noexcept |
| Debugging tool which checks all ArchDatas in existence to see if they are associated with this tree. Prints all ArchDatas in several categories (see getArchDataAssociations) | |
| void | dumpTypeMix (std::ostream &o) const |
| Dumps the mix of tree node concrete types to the ostream. | |
| void | setExtensionManager (TreeNodeExtensionManager *mgr) |
| Enable tree node extensions by giving the root node a TreeNodeExtensionsManager. | |
| const TreeNodeExtensionManager * | getExtensionManager (bool must_exist=true) const |
| Get the TreeNodeExtensionsManager. | |
| TreeNodeExtensionManager * | getExtensionManager (bool must_exist=true) |
| Get the TreeNodeExtensionsManager. | |
| Public Member Functions inherited from sparta::TreeNode | |
| const Clock * | getClock () override |
| Walks up parents (starting with self) until a parent with an associated local clock is found, then returns that clock. | |
| const Clock * | getClock () const |
| const Clock * | getLocalClock () |
| Gets the clock associated directly with this Node. This is useful for configuration and simulator debug, but not at run-time. | |
| const Clock * | getLocalClock () const |
| Scheduler * | getScheduler (const bool must_exist=false) |
| Get the scheduler associated with this tree node's root. | |
| const Scheduler * | getScheduler (const bool must_exist=false) const |
| WeakPtr | getWeakPtr () |
| Gets a weak pointer to this TreeNode. This weak pointer is guaranteed to expire when this TreeNode is destructed unless locked. | |
| ConstWeakPtr | getWeakPtr () const |
| Const variant of getWeakPtr. | |
| virtual void | addLink (TreeNode *node, const std::string &label) |
| Link this tree node with another tree node. | |
| virtual void | activateLink (const std::string &label) |
| Activate one of the links added with addLink. | |
| TreeNode ()=delete | |
| Not default-constructable. | |
| TreeNode (const TreeNode &)=delete | |
| Not copy-constructable. | |
| TreeNode (TreeNode &&rhp) | |
| Move constructor. | |
| TreeNode & | operator= (const TreeNode &)=delete |
| Not assign-constructable. | |
| TreeNode (TreeNode *parent, const std::string &name, const std::string &group, group_idx_type group_idx, const std::string &desc, bool is_indexable) | |
| TreeNode full constructor. Initializes node and adds it as a child of an existing tree node (if parent is not null). | |
| TreeNode (TreeNode *parent, const std::string &name, const std::string &group, group_idx_type group_idx, const std::string &desc) | |
| TreeNode constructor with no is_indexable parameter [defaults to true]. | |
| TreeNode (const std::string &name, const std::string &group, group_idx_type group_idx, const std::string &desc) | |
| TreeNode constructor with no parent Node. | |
| TreeNode (TreeNode *parent, const std::string &name, const std::string &desc) | |
| TreeNode constructor with no group information. | |
| TreeNode (TreeNode *parent, const std::string &group, group_idx_type group_idx, const std::string &desc) | |
| TreeNode constructor for anonymous node with group information. | |
| TreeNode (const std::string &name, const std::string &desc) | |
| TreeNode constructor with no parent node or group information. | |
| virtual | ~TreeNode () |
| Virtual destructor. | |
| void | addAlias (const std::string &alias) |
| Add a single alias for this node. | |
| void | addAliases (const AliasVector &v) |
| Adds each element of a vector of aliases to this node.. | |
| void | addTag (const std::string &tag) |
| Adds single tag to this node. | |
| void | addTags (const std::vector< std::string > &v) |
| Adds each elements of a vector of tags to this node. | |
| void | stringizeTags (std::stringstream &ss) const |
| Render tags to a string in the form: " tags:[tag0, tag1]" If there are any tags. The leading space makes this a useful sub-utility of stringize because if there are no tags, returns empty string with no leading space. | |
| node_uid_type | getNodeUID () const |
| Gets the unique ID of this node. | |
| const std::string & | getName () const override |
| Gets the name of this node. | |
| const std::string * | getNamePtr () const |
| Gets the name of this node's string pointer which isinterned in StringManager) | |
| bool | isAnonymous () const |
| Is this node anonymous. | |
| bool | isExpired () const |
| Is this expired (i.e. has it been the rhp of a move constructor) | |
| bool | isIndexableByGroup () const |
| Returns whether this object is accessible through its parent's interfaces for getting children by group and index. | |
| const std::string & | getGroup () const |
| Gets the group name of this node. | |
| const std::string * | getGroupNamePtr () const |
| Gets the group name string pointer (interned in StringManager singleton) of this node. | |
| group_idx_type | getGroupIdx () const |
| Gets the group index of this node. | |
| const std::vector< const std::string * > & | getTags () const |
| Gets the set of tags associated with this TreeNode. | |
| bool | hasTag (const std::string &tag) const |
| Does this node have a specific tag (by name) | |
| bool | hasTag (const std::string *interned_tag_name) const |
| Does this node have a specific tag (by string pointer interned with StringManager). This is faster than the alternate hasTag method because it relies only on pointer comparisons. | |
| const std::string & | getDesc () const |
| Gets the description of this node. | |
| bool | isBuiltin () const |
| Is this node in the builtins group. | |
| void | markHidden (bool hidden=true) |
| Marks this TreeNode hidden for the purposes of printint out nodes. This does not make the node inaccessible, but causes it (and its subtree) to be hidden from typical recursive tree printouts. | |
| bool | isHidden () const |
| Is this TreeNode supposed to be hidden during tree printouts This value does not have to be respected by anything using TreeNode and is mainly a UI/printout convenience. | |
| void | validateName (const std::string &nm) |
| Validates the given name string for this TreeNode. Does not consider context (e.g. name collisions) | |
| void | validateGroup (const std::string &name, const std::string &group, group_idx_type idx) |
| Validates the given group name string and group index for this TreeNode. Does not consider context (e.g. name collisions) | |
| void | validateDesc (const std::string &desc) |
| Validates the given description string for this TreeNode. | |
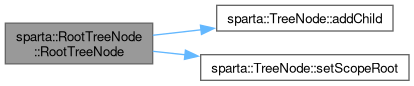
| void | addChild (TreeNode *child, bool inherit_phase=true) |
| Adds a TreeNode to this node as a child. | |
| void | addChild (TreeNode &child) |
| AddChild by reference for convenience. | |
| void | makeSubtreePrivate () |
| Make the entire subtree private. | |
| void | setScopeRoot () |
| bool | isScopeRoot () const |
| void | addExtensionFactory (const std::string &extension_name, std::function< ExtensionsBase *()> factory) |
| Add an extension factory to this tree node by its type (name). | |
| ExtensionsBase * | getExtension (const std::string &extension_name, bool no_factory_ok=false) |
| Get an extension object by extension name. | |
| const ExtensionsBase * | getExtension (const std::string &extension_name) const |
| Get an extension object by extension name. | |
| template<typename ExtensionT > | |
| ExtensionT * | getExtensionAs (const std::string &extension_name) |
| Get an extension, downcast to the given type. | |
| template<typename ExtensionT > | |
| const ExtensionT * | getExtensionAs (const std::string &extension_name) const |
| Get an extension, downcast to the given type. | |
| ExtensionsBase * | getExtension () |
| Get an extension without needing to specify any particular extension name. If no extensions exist, returns nullptr. If only one extension exists, returns that extension. If more than one extension exists, throws an exception. | |
| const ExtensionsBase * | getExtension () const |
| Get an extension without needing to specify any particular extension name. If no extensions exist, returns nullptr. If only one extension exists, returns that extension. If more than one extension exists, throws an exception. | |
| ExtensionsBase * | createExtension (const std::string &extension_name, bool replace=false) |
| Create an extension on demand. This is useful if you want to add an extension to a node that was not specified in any of the –extension-file, –arch, –config-file, or –node-config-file YAML files. | |
| ExtensionsBase * | createExtension (bool replace=false) |
| Create an extension on demand without needing to specify any particular extension name. If the arch/config/extension YAML input files have exactly one extension configured for this TreeNode, that extension will be created. | |
| ExtensionsBase * | createExtension (const char *extension_name, bool replace=false) |
| template<typename ExtensionT , typename... Args> | |
| ExtensionT * | addExtension (Args &&... args) |
| Add an extension, specifying the ExtensionsBase subclass type. Forward any arguments needed to your subclass extension's constructor. The typical use case for addExtension() over the other apis is that these extensions are meant to be dynamic-only (on-demand only), bypassing the finalizeTree() checks that all extension parameters have been read. You can call addExtension() whenever you want. | |
| template<typename Extension , typename... Args> | |
| Extension * | replaceExtension (Args &&... args) |
| Replace an extension, specifying the ExtensionsBase subclass type. This api is similar to addExtension() in that you do not have to read these parameters prior to finalizeTree() to avoid "unread unbound parameter" exceptions. | |
| bool | removeExtension (const std::string &extension_name) |
| Remove an extension by its name. Returns true if successful, false if the extension was not found. | |
| bool | hasExtension (const std::string &extension_name) const |
| Check if this tree node has an extension by the given name. | |
| template<typename ExtensionT > | |
| bool | hasExtensionOfType (const std::string &extension_name) const noexcept |
| Check if this tree node has an extension by the given name and type. | |
| std::set< std::string > | getAllInstantiatedExtensionNames () const |
| Get a list of extension names for all instantiated extensions on this TreeNode. | |
| std::set< std::string > | getAllConfigExtensionNames () const |
| Get a list of extension names found for this node in all arch/config/extension files. | |
| size_t | getNumExtensions () const |
| Get the number of extensions for this node. | |
| std::map< std::string, const ExtensionsBase * > | getAllExtensions () const |
| Get a map of extensions for this node. | |
| void | lockdownParameters () |
| Method to put the device tree in lockdown phase. All LOCKED and HIDDEN parameters are frozen after this point. Regular parameters are not affected by this phase. This method requires a Simulation pointer and will assert at compile time if anyone tries to lockdown the tree without the context of a Simulation. | |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| const T | getParentAs (bool must_exist=true) const |
| Retrieves a parent casted to type T* if this node has a parent. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| const T * | getParentAs (bool must_exist=true) const |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| T | getParentAs (bool must_exist=true) |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| T * | getParentAs (bool must_exist=true) |
| virtual TreeNode * | getRoot () |
| Gets farthest ancestor of this node. | |
| virtual const TreeNode * | getRoot () const |
| TreeNode * | getScopeRoot () |
| const TreeNode * | getScopeRoot () const |
| const TreeNode * | getExpectedRoot () const |
| build-time equivalent to getRoot before an object is actually attached to a tree. This is a mainly a framework and debugging tool for determining what the root of a node being constructed will be when complete | |
| app::Simulation * | getSimulation () const |
| Gets the simulation (if any) associated with this tree. | |
| uint32_t | getNumChildren () const |
| Gets the number of children that this node has including those in the sparta builtins group. | |
| TreeNode * | getChildAt (uint32_t idx) const |
| Gets a child at a position in the children vector in the order in which they were added to this node. | |
| const ChildrenVector | getChildren () const |
| Gets a vector of all children of this node in any group in the order in which they were added to this node. | |
| uint32_t | getChildren (std::vector< TreeNode * > &results, bool ignore_builtin_group=true, bool ignore_anonymous_nodes=true) |
| Gets all children of this node in the order in which they were added to this node. | |
| template<class T > | |
| uint32_t | getChildrenOfType (std::vector< T * > &results) const |
| return all the children matching a particular type using dynamic cast. | |
| sparta::TreeNode * | findAncestorByName (const std::string &name) |
| Find ancestor by name. | |
| template<typename T > | |
| sparta::TreeNode * | findAncestorByType () |
| Find ancestor by type. | |
| sparta::TreeNode * | findAncestorByTag (const std::string &tag) |
| Find the first ancestor with a particular tag. | |
| template<typename T > | |
| T * | findAncestorResourceByType () |
| Find an ancestor's resource with a certain type. | |
| const AliasVector & | getAliases () const |
| Gets a vector of all aliases of this node. | |
| uint32_t | getChildrenIdentifiers (std::vector< std::string > &idents, bool ignore_builtin_group=true) const |
| Gets all child identifiers, aliases, group names, and group-aliases which can be used to refer to a child of this node. | |
| std::vector< const std::string * > | getIdentifiers () const |
| Gets all the identifiers for this node (excluding groups) | |
| uint32_t | getGroupSize (const std::string &group) |
| Gets the number of nodes in a group. | |
| group_idx_type | getGroupIndexMax (const std::string &group) |
| Gets the largest index of a node in the given group. | |
| uint32_t | getGroup (const std::string &group, std::vector< TreeNode * > &results) |
| Gets all nodes in a child group. | |
| uint32_t | findChildren (const std::string &pattern, std::vector< TreeNode * > &results, std::vector< std::vector< std::string > > &replacements) |
| Finds all children starting at this node with a given pattern relative to this node by matching names an aliases. Appends each found child to <results>. | |
| uint32_t | findChildren (const std::string &pattern, std::vector< TreeNode * > &results) |
| Version of findChildren with no replacements vector. | |
| virtual uint32_t | findImmediateChildren_ (std::regex &expr, std::vector< TreeNode * > &found, std::vector< std::vector< std::string > > &replacements, bool allow_private=false) |
| Finds immediate children with some identity (name or alias) matching a regex. | |
| uint32_t | findImmediateChildren_ (std::regex &expr, std::vector< TreeNode * > &found, bool allow_private=false) |
| Variant of findImmediateChildren_ with no replacements vector. | |
| virtual uint32_t | findImmediateChildren_ (std::regex &expr, std::vector< const TreeNode * > &found, std::vector< std::vector< std::string > > &replacements, bool allow_private=false) const |
| Const-qualified variant of findImmediateChildren_. | |
| uint32_t | findImmediateChildren_ (std::regex &expr, std::vector< const TreeNode * > &found, bool allow_private=false) const |
| Variant of const-qualified findImmediateChildren_ with no replacements vector. | |
| bool | locationMatchesPattern (const std::string &pattern, const TreeNode *pat_loc) const |
| Determines if the given pattern (which may contain wildcards) can describe this node. | |
| TreeNode * | getChild (const std::string &name, bool must_exist=true) |
| Retrieves a child with this dotted path name. | |
| const TreeNode * | getChild (const std::string &name, bool must_exist=true) const |
| Overloaded const-qualified. | |
| std::string | getDeepestMatchingPath (const std::string &path) const |
| Gets the deepest whole node location starting from this node that matches some part of path starting at its beginning. | |
| bool | hasChild (const std::string &name) const noexcept |
| Determines if a child can be found with the given dotted path. | |
| bool | hasImmediateChild (const TreeNode *n) const noexcept |
| Determines if the node n is an immediate child of this node. | |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type, class ConstT = typename ptr_to_const_obj_ptr<T>::type> | |
| const ConstT | getChildAs (const std::string &name, bool must_exist=true) const |
| Retrieves a child that is castable to T with the given dotted path. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| const T * | getChildAs (const std::string &name, bool must_exist=true) const |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| T | getChildAs (const std::string &name, bool must_exist=true) |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| T * | getChildAs (const std::string &name, bool must_exist=true) |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type, class ConstT = typename ptr_to_const_obj_ptr<T>::type> | |
| ConstT | getAs () const |
| Retrieves this node after casting to type T. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| const T * | getAs () const |
| Retrieves this node after casting to type const T. | |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| T | getAs () |
| Retrieves this node after casting to type const T. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| T * | getAs () |
| Retrieves this node after casting to type const T. | |
| uint32_t | findChildrenByTag (const std::string &tag, std::vector< TreeNode * > &results, int32_t max_depth=-1) |
| Finds a set of all children having the selected tag which this node or descendants of this node within a distance of the given max_depth. | |
| bool | isDescendantOf (const TreeNode *ancestor, int32_t max_depth=-1) const |
| Determines if this node is a descendant of the specified ancestor node within some number of generations (depth). | |
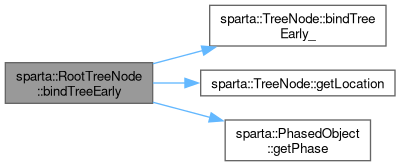
| std::string | getLocation () const override final |
| std::string | getDisplayLocation () const |
| Returns the location of this node in the device tree which might not be usable for navigating the device tree (it cannot be used as an argument for getChild/findChildren). | |
| std::string | getExpectedLocation () const |
| build-time equivalent to getLocation before an object is actually attached to a tree. This is a mainly a framework and debugging tool for determining what the location of a node currently being constructed will be when complete. | |
| std::string | renderSubtree (int32_t max_depth=-1, bool show_builtins=false, bool names_only=false, bool hide_hidden=false, bool(*leaf_filt_fxn)(const TreeNode *)=nullptr) const |
| Renders the subtree starting at this node as a string containing an indentation-based depth-first representation. | |
| uint32_t | getLevel () const |
| Gets the level of this node. 0 is root. | |
| template<typename T > | |
| uint32_t | getRecursiveNodeCount () const |
| Recursively gets the count of a nodes that are a subclass of a particular type (determined by dynamic_cast). Includes all descendants of this node in the tree, but excludes this node. | |
| uint32_t | getPossibleNotifications (std::vector< NotificationInfo > &infos) const |
| Gets information on the possible notifications generated by this node (excludes children). | |
| void | dumpPossibleNotifications (std::ostream &o) const noexcept |
| Dumps a listing of the notifications which this node can generate to the ostream o. | |
| template<typename DataT = ANY_TYPE> | |
| uint32_t | locateNotificationSources (std::vector< TreeNode * > &nodes, const std::string &name="") |
| Gets all possible notification info from NotificationSources within this node's subtree. | |
| template<typename DataT = ANY_TYPE> | |
| void | dumpLocatedNotificationSources (std::ostream &o, const std::string &name="") |
| Retrieves the relevant NotificationSources from locateNotificationSources and prints them to the output o. | |
| uint32_t | getPossibleSubtreeNotifications (std::vector< NotificationInfo > &infos) const noexcept |
| Gets information on the possible notifications generated by this node and all its descendants. | |
| void | dumpPossibleSubtreeNotifications (std::ostream &o) const noexcept |
| Dumps a listing of the notifications which this node and its descendants can generate to the ostream o. | |
| bool | canGenerateNotification (const std::type_info &tinfo, const std::string *name) const |
| Can this TreeNode generate a notification of the given type having the given name or pattern. | |
| bool | canGenerateNotification (const std::type_info &tinfo, const std::string &name) const |
| Can this TreeNode generate a notification of the given type having the given name (does not require interned string - will intern automatically with StringManager). | |
| bool | canGenerateNotification (const NotificationInfo &info) const |
| Can this TreeNode generate a notification of the given NotificationInfo. | |
| bool | canSubtreeGenerateNotification (const std::type_info &tinfo, const std::string *name) const |
| Can this TreeNode or its descendants (of any distance) generate a notification of the given type having the given name. | |
| bool | canSubtreeGenerateNotification (const std::type_info &tinfo, const std::string &name) const |
| Can this TreeNode or its descendants (of any distance) generate a notification of the given type having the given name (does not require interned string) | |
| bool | canSubtreeGenerateNotifications (const std::type_info &tinfo, const std::vector< const std::string * > &names) const |
| Checks to see if any a subtree can generate any of several notification names which may be patterns. | |
| template<typename DataT , typename T , void(T::*)(const TreeNode &, const TreeNode &, const DataT &) TMethod> | |
| void | registerForNotification (T *obj, const std::string &name, bool ensure_possible=true) |
| Registers a callback method to listen for all notifications having the specified data type DataT and name (or any name if name is "") occuring on this node or any descendant (subtree). | |
| template<typename DataT , typename T , void(T::*)(const DataT &) TMethod> | |
| void | registerForNotification (T *obj, const std::string &name, bool ensure_possible=true) |
| template<typename DataT , typename T , void(T::*)(const TreeNode &, const TreeNode &, const DataT &) TMethod> | |
| void | deregisterForNotification (T *obj, const std::string &name) |
| Removes at most one registration made with registerForNotification. | |
| template<typename DataT , typename T , void(T::*)(const DataT &) TMethod> | |
| void | deregisterForNotification (T *obj, const std::string &name) |
| bool | hasObserversRegisteredForNotification (const std::type_info &tinfo, const std::string *name) const noexcept |
| Determines if this TreeNode (not descendants) has any observers for this type of event and name. | |
| void | getDelegatesRegisteredForNotification (const std::type_info &tinfo, const std::string *name, std::vector< delegate > &dels) noexcept |
| Gets the vector of delegates registered for a notification on this TreeNode. | |
| Public Member Functions inherited from sparta::ResourceContainer | |
| ResourceContainer () | |
| Consturct with a null, unlocked resource. | |
| ResourceContainer (const ResourceContainer &)=delete | |
| Copy construction disbled. | |
| ResourceContainer (ResourceContainer &&)=default | |
| Move constructor. | |
| virtual | ~ResourceContainer () |
| Destructor. | |
| Resource * | getResource () |
| Gets the resource contained by this node if any. May only be called after finalization begins or during teardown. | |
| const Resource * | getResource () const |
| Const variant of getResource. | |
| bool | hasResource () const |
| Determines if this node has a resource. This method exists in case the TreeNode is being explored by a tool or interactive UI. Typical TreeNode clients (such as Resources) will assume that there is a resource if they are expecting one. | |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| const T | getResourceAs () const |
| Gets the resource contained by this node (if any) as the given type. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| const T * | getResourceAs () const |
| Overload of getResourceAs for const access with a non-pointer template type. | |
| template<class T , typename = typename std::enable_if<std::is_pointer<T>::value>::type> | |
| T | getResourceAs () |
| Non-const overload of getResourceAs. | |
| template<class T , typename = typename std::enable_if<!std::is_pointer<T>::value>::type> | |
| T * | getResourceAs () |
| Non-const overload of getResourceAs. | |
| virtual std::string | getResourceType () const |
| Gets the typename of the resource that this node will eventually contain. | |
| virtual std::string | getResourceTypeRaw () const |
| Gets the typename of the resource that this node will eventually contain. | |
| Public Member Functions inherited from sparta::PhasedObject | |
| PhasedObject (PhasedObject &&)=default | |
| TreePhase | getPhase () const |
| Gets the trees current phase. | |
| virtual bool | isBuilding () const |
| Is this node (and thus the entire tree above and below it) currently in the TREE_BUILDING phase. | |
| virtual bool | isBuilt () const |
| Is this node (and thus the entire tree above it) "built". Checks that getPhase has passed TREE_BUILDING. | |
| virtual bool | isConfigured () const |
| Is this node (and thus the entire tree above it) "configured". Checks that getPhase has passed TREE_CONFIGURING (i.e. FINALIZED, FINALIZING, TEARDOWN, etc). | |
| virtual bool | isConfiguring () const |
| Is this node (and thus the entire tree above it) currently in the TREE_CONFIGURING phase. | |
| virtual bool | isFinalizing () const |
| Is this node (and thus the entire tree above it) "finalized". | |
| virtual bool | isFinalized () const |
| Is this node (and thus the entire tree above it) "finalized". | |
| virtual bool | isTearingDown () const |
| Is this node (and thus the entire tree above it) in the "teardown" phase. | |
| Public Member Functions inherited from sparta::ArchDataContainer | |
| std::vector< ArchData * > | getAssociatedArchDatas () |
| Retrieves all ArchDatas associated with this TreeNode so that children can use it to allocate their data. | |
| const std::vector< ArchData * > | getAssociatedArchDatas () const |
| Const variant of getAssociatedArchDatas. | |
| ArchDataContainer ()=default | |
| Default constructor. | |
| ArchDataContainer (ArchDataContainer &)=delete | |
| Copy construction disabled. | |
| ArchDataContainer (ArchDataContainer &&)=default | |
| Move constructor. | |
| virtual | ~ArchDataContainer () |
| Virtual destructor. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from sparta::TreeNode | |
| static std::string | createSearchRegexPattern (const std::string &pat) |
| Compute a regex pattern for a node child path containing any number of wildcard characters (not a dot-separated location) which can be used to test against child node names. | |
| static bool | hasWildcardCharacters (const std::string &name) |
| Determines if a given node name has any wildcard characters which will be substituted in createSearchRegexPattern. | |
| static std::string | getNextName (const std::string &name, size_t &pos) |
| Gets the next name between two '.' chars in a string starting at pos. | |
| static bool | matchesGlobLike (const std::string &pattern, const std::string &other) |
| Determine if a glob-like search pattern matches some other string. | |
| static const std::map< const TreeNode *, WeakPtr > & | getParentlessNodes () |
| static const std::map< const TreeNode *, WeakPtr > & | getAllNodes () |
| Gets the vector of all TreeNodes currently known to be constructed. | |
| static std::string | formatAllNodes () |
| Prints the list of all TreeNodes currently known to be constructed. | |
| static bool | isNodeConstructed (const TreeNode *) |
| Is a given node constructed? | |
| static TreeNode * | getVirtualGlobalNode () |
| Gets the virtual global node singleton. This node can have no parent and no children. It receives notifications from all nodes in the simulator as if it were the parent of every node in the simulation that has no parent. | |
| static std::vector< const std::string * > | parseNotificationNameString (const std::string &csl) |
| Parses a comma-separated list of notification names (or patterns) separated by commas and ignoring whitespace around commas. | |
| static bool | notificationCategoryMatch (const std::string *query_id, const std::string *node_id) |
| Checks if two notification categories match where one is an actual category. | |
| Static Public Attributes inherited from sparta::TreeNode | |
| static const group_idx_type | GROUP_IDX_NONE = (group_idx_type)-1 |
| GroupIndex indicating that a node has no group index because it belongs to no group. | |
| static const node_uid_type | MAX_NODE_UID |
| Maximum value of node_uid_ before the framework throws an exception. | |
| static constexpr char | GROUP_NAME_NONE [] = "" |
| Group name indicating that a node belongs to no group. | |
| static constexpr char | NODE_NAME_NONE [] = "" |
| Node name for anonymous node. | |
| static const std::string | DEBUG_DUMP_SECTION_DIVIDER |
| String dividing sections in a debug dump file. | |
| static constexpr char | NODE_NAME_VIRTUAL_GLOBAL [] = "_SPARTA_virtual_global_" |
| Node name for the virtual glopbal node. | |
| static constexpr char | LOCATION_NODE_SEPARATOR_ATTACHED = '.' |
| Separator character between node identifiers in a location string when the child is attached to the parent. | |
| static constexpr char | LOCATION_NODE_SEPARATOR_EXPECTING = ',' |
| Separator character between node identifiers in a location string when the child is being attached to the parent but has not been entirely attached (i.g. during construction of the child node) | |
| static constexpr char | LOCATION_NODE_SEPARATOR_UNATTACHED = '~' |
| Separator character preceding a node identifiers in a location string when that node has no parent and is not in the process of being attached to one. | |
| static const uint32_t | RENDER_SUBTREE_INDENT = 2 |
| Spaces to indent for each tree level in sparta::TreeNode::renderSubtree. | |
| static constexpr char | GROUP_NAME_BUILTIN [] = "_SPARTA_builtin_group_" |
| Reserved name for built-in nodes. | |
| static const uint64_t | CHILD_FIND_THRESHOLD = 100000 |
| Threshold for number of findChildren calls after finalization before a warning message is printed about framework misuse. | |
| static const uint64_t | CHILD_GET_THRESHOLD = 100000 |
| Threshold for number of getChild calls after finalization before a warning message is printed about framework misuse. | |
| static const uint32_t | TEARDOWN_ERROR_LIMIT = 5 |
| Number of teardown-phase-related messages that can be printed before the rest will be suppressed. | |
| static const std::vector< std::pair< const char *, std::function< void(std::string &)> > > | TREE_NODE_PATTERN_SUBS |
| List of pattern susbtitutions when creating a search pattern from a TreeNode name containing wildcards. | |
| Protected Types inherited from sparta::TreeNode | |
| typedef std::vector< delegate > | DelegateVector |
| Vector of delegates representing a list of observers to notify. | |
| typedef std::map< type_info_container, DelegateVector > | NotificationObserverMap |
| Map of delegate vectors containing all observers. | |
| Protected Member Functions inherited from sparta::TreeNode | |
| std::pair< uint32_t, std::string > | recursGetDeepestMatchingPath_ (const std::string &path, size_t name_pos) const |
| Finds the deepest node path mathing the input path. Implements getDeepestMatchingPath. | |
| void | setExpectedParent_ (const TreeNode *parent) |
| Tracks a node as an expected parent without actually adding this node as a child. This is used almost exclusively for printing error messages which include a device-tree location BEFORE actually inserting this node into the device tree since node construction can fail. | |
| void | enterFinalizing_ () |
| Recursively enter TREE_FINALIZING phase. | |
| void | finalizeTree_ () |
| Recursively create resources based on tree configuration. enter_finalize_ should be invoked after this method successfully completes for an entire tree. Finalizes in the order of construction. | |
| void | validateTree_ () |
| Iterates the finalized tree and validates each node (e.g. ensures statistics can be evaluated) | |
| void | enterFinalized_ () |
| Recursively enter TREE_FINALIZED phase. | |
| void | enterConfig_ () noexcept |
| Recursively enter TREE_CONFIGURING phase. | |
| void | bindTreeEarly_ () |
| Recursively invoke TreeNode::onBindTreeEarly_ and Resource::onBindTreeEarly_ (in that order for each node) | |
| void | bindTreeLate_ () |
| Recursively invoke TreeNode::onBindTreeEarly_ and Resource::onBindTreeLate_ (in that order for each node) | |
| void | simulationTerminating_ () |
| Hook to allow simulation resources to clean-up before simulation is ended. | |
| void | validatePostRun_ (const PostRunValidationInfo &info) const |
| Hook to check the state of the simulator post-run and throw exceptions if something is incorrect. | |
| void | dumpDebugContent_ (std::ostream &out) const noexcept |
| Allows resources to write out detailed textual debugging information about the node. This is typically called by a simulator when shutting down due to an exception (or depending on simulator config). However, it could also be called at other times. | |
| void | enterTeardown_ () noexcept |
| Recursively enter TREE_TEARDOWN phase while alerting nodes through onEnteringTeardown_ and alterting Resources through Resource::onStartingTeardown_. Nodes already in TREE_TEARDOWN phase will not be alerted (neither will their associated Resources). All nodes are visited regardless of their parent's phase. | |
| void | verifyUniqueChildIdentifier_ (const std::string &ident, bool ignore_group_collision=false) |
| Verifies that the given identifier is unique for all children of this node by comparing against names, groups, and aliases. Throws SpartaException if not unique. | |
| void | removeChildForTeardown_ (TreeNode *child) |
| "Removes" the given child by invoking onDestroyingChild_ then removing this child from the children_ list | |
| void | removeFromParentForTeardown_ (TreeNode *parent) |
| Protected Wrapper for getParent()->removeChildForTeardown_ which allows subclases of TreeNode to indirectly invoke removeChildForTeardown_ with themselves as the argument. | |
| void | detachFromParent_ () |
| Removes a node from its parent with the expectation this node will be immediately destroyed (i.e. is an xvalue) | |
| void | detachFromChildren_ () |
| Removes a node from its children with the expectation this node will be immediately destroyed (i.e. is an xvalue) | |
| bool | areParametersLocked_ () const |
| This method informs whether the tree is past the lockdown phase for all LOCKED and HIDDEN parameters. Modifying LOCKED and HIDDEN parameters after this phase is disallowed. Tree can be locked down during TREE_BUILDING phase or TREE_CONFIGURING phase. During TREE_FINALIZING phase, all parameters are locked down as is. | |
| template<typename DataT > | |
| void | postPropagatingNotification_ (const TreeNode *origin, const DataT &data, const std::string *name_id) |
| Starts a notification propagating up the tree. | |
| template<typename DataT , typename T , void(T::*)(const TreeNode &, const TreeNode &, const DataT &) TMethod> | |
| DelegateVector::iterator | findDelegate_ (DelegateVector &dvec, T *obj, const std::string &target_name) |
| Finds a delegate associated with the given type T, object pointer, DataT, and TMethod within a DelevateVector. The intent of this function is to help see if a delegate is already registered with a calback by checking all known information associated with that callback against the input arguments. | |
| template<typename DataT , typename T , void(T::*)(const DataT &) TMethod> | |
| DelegateVector::iterator | findDelegate_ (DelegateVector &dvec, T *obj, const std::string &target_name) |
| virtual void | broadcastRegistrationForNotificationToChildren_ (const std::type_info &tinfo, const std::vector< const std::string * > &name_ids, TreeNode *obs_node, const delegate *del, const bool allow_private) |
| Recursively notifies children that the notification described is now (or still is) being observed at the observation point TreeNode obs_node with the newly registered delegate del. | |
| virtual void | broadcastDeregistrationForNotificationToChildren_ (const std::type_info &tinfo, const std::vector< const std::string * > &name_ids, TreeNode *obs_node, const delegate *del, const bool allow_private) |
| Recursively notifies children that the notification described has lost one particular observer (del) which was observing at the observation point TreeNode obs_node with the delegate del. | |
| void | broadcastRegistrationForNotificationListStringToChildren_ (const std::type_info &tinfo, const std::string &name, TreeNode *obs_node, const delegate *del, const bool private_only) |
| Entry point to broadcastRegistrationForNotificationToChildren_ recursion. Breaks a name string. | |
| void | broadcastDeregistrationForNotificationListStringToChildren_ (const std::type_info &tinfo, const std::string &name, TreeNode *obs_node, const delegate *del, const bool private_only) |
| Symmetric oppostie of broadcastRegistrationForNotificationListStringToChildren_. | |
| template<typename DataT > | |
| void | invokeDelegatesOn_ (TreeNode *to_invoke, const DataT &data, const std::string *name_id) |
| Protected wrapper for invokeDelegates_ which allows a TreeNode to invoke delegates on another TreeNode using itself as the origin. | |
| Protected Member Functions inherited from sparta::ResourceContainer | |
| std::string | getResourceTypeName_ () const |
| Gets the rtti type name (demangled) of the resource type held by this container. If there is no resource held, returns empty string. | |
| void | setResource_ (Resource *r) |
| Allows subclasses to assign the resource associated with this node. | |
| void | unsetResource_ () |
| Allows a resource to unset the resource set with setResource_. | |
| void | lockResource_ () |
| Allows subclasses to assign the resource associated with this node. | |
| Resource * | getResource_ () noexcept |
| Returns the currently held resource of this node (if any). This method can be called at any time. | |
| const Resource * | getResource_ () const noexcept |
| Const variant of getResource_. | |
| Protected Member Functions inherited from sparta::PhasedObject | |
| void | setPhase_ (TreePhase phase) |
| Sets the current phase. | |
| Static Protected Member Functions inherited from sparta::TreeNode | |
| static bool | identityMatchesPattern_ (const std::string &ident, std::regex &expr, std::vector< std::string > &replacements) |
| Performs pattern matching on a identity string. | |
| static bool | identityMatchesPattern_ (const std::string &ident, std::regex &expr) |
| Variant of identityMatchesPattern_ with no replacements vector. | |
| static std::string | getPreviousName_ (const std::string &name, size_t &pos) |
| Gets the previous name between two '.' chars in a string starting at pos. | |
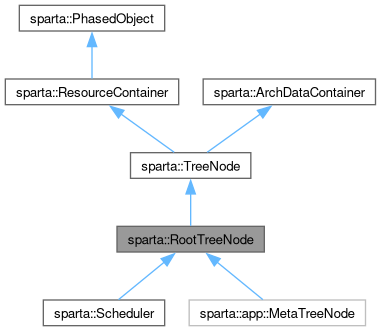
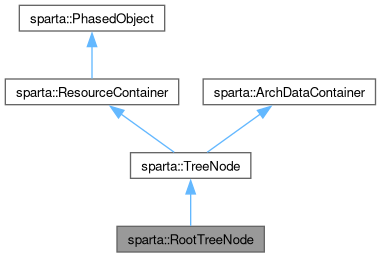
Detailed Description
TreeNode which represents the root ("top") of a device tree.
Has special behavior in that it is always attached. It provides an interface for updating tree phases as well.
Multiple roots cannot exist in the same tree since they can have no parent. Therefore, it is safe for different tree to be in different phases of construction. Multiple roots can, however, share the same global search scope. See getSearchScope
This class cannot be subclassed
Definition at line 54 of file RootTreeNode.hpp.
Member Typedef Documentation
◆ NewDescendantNotiSrc
Type for notification source in this node which is posted when a new descendent is attached.
Definition at line 62 of file RootTreeNode.hpp.
Constructor & Destructor Documentation
◆ RootTreeNode() [1/9]
|
inline |
Constructor.
- Parameters
-
name Name of this node [default="top"] desc Description of this node sim Simulator owning this tree search_scope This node can be shared between multiple roots and allows searches to be performed on it that include this root node and others in the search pattern (e.g. "top.x.y.z") by using the sparta::TreeNode::getChild* and findChildren methods on the search_scope node. If nullptr, the RootTreeNode will allocate its own search node containing only this root, and delete it at destruction. Generally, the global node can be shared but for testing it is convenient to have a null global node.
- Note
- search_scope will not be a parent of this instance, but this instance will be a child of search_scope.
Definition at line 80 of file RootTreeNode.hpp.
◆ RootTreeNode() [2/9]
|
inline |
Constructor with name, desc, and search scope.
Definition at line 113 of file RootTreeNode.hpp.
◆ RootTreeNode() [3/9]
|
inline |
Constructor with name only.
Definition at line 124 of file RootTreeNode.hpp.
◆ RootTreeNode() [4/9]
|
inline |
Consturctor with name, desc, and simulator.
Definition at line 133 of file RootTreeNode.hpp.
◆ RootTreeNode() [5/9]
|
inline |
Constructor with name and desc.
- Note
- Uses null search scope and null simulator
Definition at line 145 of file RootTreeNode.hpp.
◆ RootTreeNode() [6/9]
|
inline |
Constructor with only a simulator.
Definition at line 155 of file RootTreeNode.hpp.
◆ RootTreeNode() [7/9]
|
inline |
Constructor with only a search scope.
Definition at line 164 of file RootTreeNode.hpp.
◆ RootTreeNode() [8/9]
|
inline |
Constructor with only a simulator and search scope.
Definition at line 173 of file RootTreeNode.hpp.
◆ RootTreeNode() [9/9]
|
inline |
Default constuctor.
Definition at line 182 of file RootTreeNode.hpp.
◆ ~RootTreeNode()
|
inlinevirtual |
Destructor.
Must not place the Tree into teardown mode. Tree content could have been removed before this and walking those deleted nodes here would be an error.
Definition at line 195 of file RootTreeNode.hpp.

Member Function Documentation
◆ bindTreeEarly()
|
inline |
Public method for recursively giving all resources and nodes a chance to bind ports locally. Recurses depth first by order of construction of each child in each node encountered.
- Note
- This should be done by a simulator before allowing top-level binding within that simulator.
- Warning
- This should not be called once the simulation is running
- Todo
- Prevent this from being called when the simulation is running
- Exceptions
-
SpartaException on error. Can be called again if an exception is thrown.
- Precondition
- Tree must be in TREE_FINALIZED phase (i.e. after enterFinalized is called successfully)
- See also
- bindTreeLate This can only be invoked at the root of a tree
Definition at line 292 of file RootTreeNode.hpp.
◆ bindTreeLate()
|
inline |
Public method for recursively giving all resources and nodes a chance to bind ports locally. Recurses depth first by order of construction of each child in each node encountered.
- Note
- This should be done by a simulator after allowing top-level binding within that simulator.
- Precondition
- Tree must be in TREE_FINALIZED phase (i.e. after enterFinalized is called successfully)
- See also
- bindTreeEarly
Definition at line 312 of file RootTreeNode.hpp.
◆ dumpArchDataAssociations()
|
noexcept |
Debugging tool which checks all ArchDatas in existence to see if they are associated with this tree. Prints all ArchDatas in several categories (see getArchDataAssociations)
- Parameters
-
o Ostream to which results will be printed
If should be regarded as an error in an actual production simulation if any ArchDatas are found in to be unassociated or associated without being part of a tree.
◆ dumpDebugContent()
|
inlinenoexcept |
Dump all debug content from each resource in the tree to an ostream.
- Parameters
-
out Output stream to which all debug content is written
- Todo
- Replace this method with a method that places all output into different files within a subfolder
- Exceptions
-
Must not throw
- Note
- This is typically called at shutdown on error, but simulators may use it differently
Definition at line 372 of file RootTreeNode.hpp.

◆ enterConfiguring()
|
inline |
Public method to crystalize the tree structure and begin configuring.
- Precondition
- Tree must be in TREE_BUILDING phase. Note that subtrees below the root can still be in earlier phases.
This can only be invoked at the root of a tree
Definition at line 250 of file RootTreeNode.hpp.
◆ enterFinalized()
| void sparta::RootTreeNode::enterFinalized | ( | sparta::python::PythonInterpreter * | pyshell = nullptr | ) |
Public method for recursive tree finalization. Places tree temporarily into TREE_FINALIZING phase before finalizing, then places tree into TREE_FINALIZED.
- Exceptions
-
SpartaException on error. Can be called again if an exception is thrown.
- Precondition
- Tree must be in TREE_CONFIGURING phase. Note that subtrees below the root can still be in earlier phases.
- Postcondition
- Tree will be in TREE_FINALIZED phase if successful
- See also
- sparta::TreeNode::isConfiguring
- sparta::TreeNode::isFinalizing
- sparta::TreeNode::isFinalized
This can only be invoked at the root of a tree
◆ enterTeardown()
|
inline |
Places this tree into TREE_TEARDOWN phase so that nodes may be deleted without errors.
- Precondition
- Tree can be in ANY phase
- Exceptions
-
SpartaException on error. Can be called again if an exception is thrown.
- See also
- sparta::TreeNode::isTearingDown
This can only be invoked at the root of a tree
Definition at line 386 of file RootTreeNode.hpp.

◆ getArchDataAssociations()
|
noexcept |
Gets vectors of all the ArchData instances in existance now categorized into several groups. Inputs are cleared before appending.
- Parameters
-
ad_this_tree ArchDatas associated with this tree ad_no_assoc ArchDatas having no association ad_not_attached ArchDatas associated with nodes that are not part of ANY tree ad_other_tree ArchDatas associated with nodes that are pat of a different tree
- Note
- All inputs are cleared before appending
◆ getExtensionManager() [1/2]
|
inline |
Get the TreeNodeExtensionsManager.
Definition at line 497 of file RootTreeNode.hpp.
◆ getExtensionManager() [2/2]
|
inline |
Get the TreeNodeExtensionsManager.
Definition at line 487 of file RootTreeNode.hpp.
◆ getNodeAttachedNotification()
|
inline |
Returns the post-write notification-source node for this register which can be used to observe writes to this register. This notification is posted immediately after the register has been written and populates a sparta::Register::PostWriteAccess object with the results.
Refer to PostWriteNotiSrc (sparta::NotificationSource) for more details. Use the sparta::NotificationSource::registerForThis and sparta::NotificationSource::deregisterForThis methods.
Definition at line 419 of file RootTreeNode.hpp.
◆ getParent() [1/2]
|
inlinefinaloverridevirtual |
Reimplemented from sparta::TreeNode.
Definition at line 214 of file RootTreeNode.hpp.
◆ getParent() [2/2]
|
inlinefinaloverridevirtual |
Gets immediate parent of this node if one exists.
- Returns
- parent TreeNode if there is one. Otherwise returns 0.
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Reimplemented from sparta::TreeNode.
Definition at line 211 of file RootTreeNode.hpp.
◆ getSearchScope()
|
inline |
Gets the search node "parent" of this root node which is suitable for performing searches that include the name of this root node (e.g. "top.x.y.z").
- Returns
- Global search node. Guaranteed not to be nullptr.
Definition at line 237 of file RootTreeNode.hpp.
◆ getSimulator()
|
inline |
Gets the simulator (if any) associated with this Root node.
Definition at line 227 of file RootTreeNode.hpp.
◆ isAttached()
|
inlinefinaloverridevirtual |
Is this node part of a device tree with a proper RootTreeNode at the root.
- Returns
- true if node is a child of a RootTreeNode regardless of how many tree levels separate them
Reimplemented from sparta::TreeNode.
Definition at line 206 of file RootTreeNode.hpp.
◆ setClock()
|
inlinefinaloverridevirtual |
Assigns a clock to this node. This clock will then be accessed by any descendant which has no assigned clock or an ancestor with an assigned clock between that descendant and this node. getClock returns the Clock associated with the nearest ancestor.
- Parameters
-
clk Clock to assign. Must not be null.
- Precondition
- Must be in the TREE_BUILDING phase
- Can only assign a non-NULL value once
Reimplemented from sparta::TreeNode.
Definition at line 217 of file RootTreeNode.hpp.

◆ setExtensionManager()
| void sparta::RootTreeNode::setExtensionManager | ( | TreeNodeExtensionManager * | mgr | ) |
Enable tree node extensions by giving the root node a TreeNodeExtensionsManager.
- Exceptions
-
Throws if this is called after the tree is built. Throws if the TreeNodeExtensionManager was already set.
◆ simulationTerminating()
|
inline |
Called after simulation has stopped, but before statistic/report generation.
This method is called by the Simulation class after it has detected that simulation has stopped, but before reports or statistics are generated/collected.
As a sparta::Resource or sparta::Unit, the developer can override the private method simulationTerminating_() and perform last minute cleanup of their component.
Definition at line 333 of file RootTreeNode.hpp.

◆ stringize()
|
inlineoverridevirtual |
Render description of this RootTreeNode as a string.
- Returns
- String description of the form
* <location (root)> *
Reimplemented from sparta::TreeNode.
Definition at line 397 of file RootTreeNode.hpp.

◆ validateArchDataAssociations()
| void sparta::RootTreeNode::validateArchDataAssociations | ( | ) | const |
Gets the results.
- Exceptions
-
SpartaException if there are any ArchDatas found with no association or any ArchDatas not attached to a tree root.
ArchDatas associated with this tree and part of other trees are always acceptable. ArchDatas without a clear tree association are dangerous and it is the responsibility of the caller to determine if that is expected behavior
◆ validatePostRun()
| void sparta::RootTreeNode::validatePostRun | ( | ) |
Validate all resources in the simulator, throwing exceptions if invalid state is detected. Exceptions are allowed to propogate out of this method.
- Exceptions
-
Any Exception
◆ validatePreRun()
|
inline |
Validate the entire tree immediately prior to running. All ports should be bound ,etc. Does not change phase.
- Precondition
- Tree must be in phase TREE_FINALIZED
- Note
- Uses validateTree_
Definition at line 343 of file RootTreeNode.hpp.
The documentation for this class was generated from the following file:
- /github/workspace/sparta/sparta/simulation/RootTreeNode.hpp